

Обзор новых роботов Hanwha HCR-A

Всем привет! С вами Top 3D Group и в очередном обзоре мы рассказываем о новой серии коллаборативных роботов Hanwha HCR-A и о том, чем она отличается от предыдущей серии коботов Hanwha.
Читайте статью, чтобы узнать больше.
Содержание
- Содержание
- О компании
- Коллаборативные роботы Hanwha HCR-A
- Описание
- Отличительные особенности серии Hanwha HCR-A
- ПО
- Сравнение коботов Hanwha HRC-A и Universal Robots
- Кейсы Top 3D Group по интеграции роботов Hanwha
- Окупаемость
- Преимущества Hanwha HCR-A
- Ограничения
- Итого
О компании

Источник: hanwha.com
Южнокорейская компания Hanwha Techwin разрабатывает и производит высокоточных маневренных коллаборативных роботов. Hanwha HCR-5, первый кобот компании, был представлен в июле 2017 года. Коботы Hanwha просты в настройке и не требуют специальной квалификации при обслуживании. Все роботы Hanwha безопасны для человека, благодаря ограничению движения суставов по скорости и крутящему моменту и наличию большого количества датчиков.
После выпуска HCR-5 линейка дополнилась коботами HCR-3 и HCR-12. Цифровой индекс указывает максимальную грузоподъемность модели. Спустя три года коллаборативные роботы серии HCR подверглись апгрейду, обновленные модели вошли в новую серию HCR-A.
Коллаборативные роботы Hanwha HCR-A
Источник: top3dshop.ru
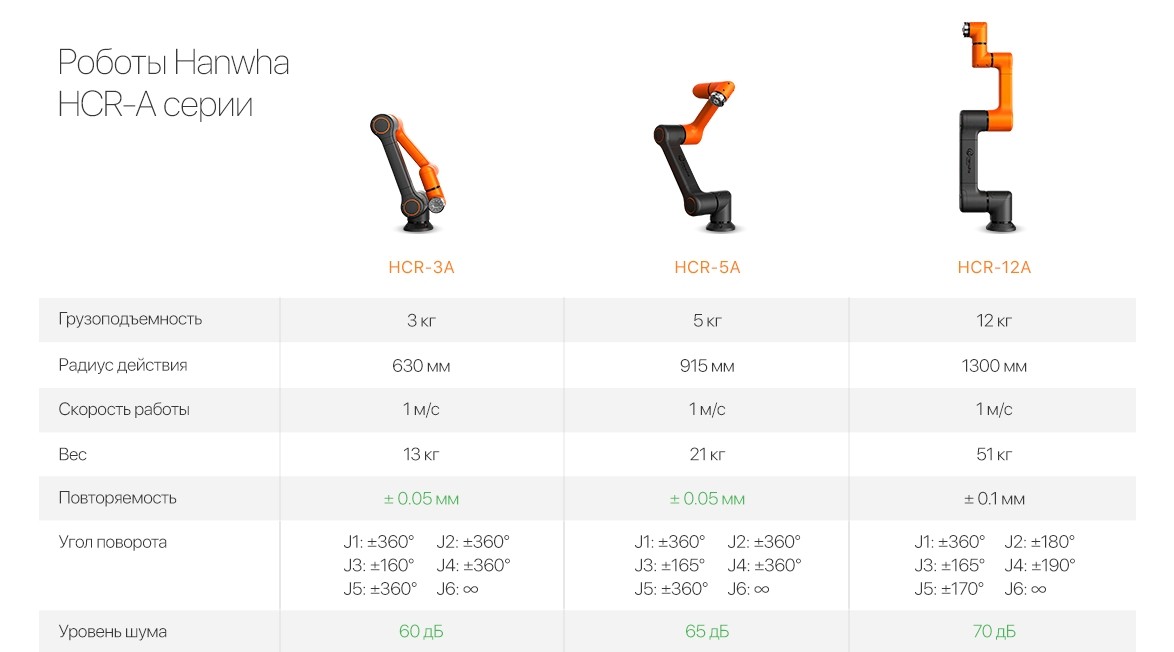
Характеристики Hanwha HCR-3A

- Количество осей:6Грузоподъемность:3 кг
- Радиус действия:630 ммУгол поворота:J1: ±360 °, J2: ±360 °, J3: ±160 °, J4: ±360 °, J5: ±360 °, J6: ∞
- Максимальная скорость:J1: 180 °/сек, J2: 180 °/сек, J3: 180 °/сек, J4: 360 °/сек, J5: 360 °\/сек, J6: 360 °/секЛинейная скорость:1 м/с
- Повторяемость:± 0,05 ммУровень шума:60 дБ
- Размер упаковки:450 х 470 х 223 мм
Характеристики Hanwha HCR-5A

- Количество осей:6Грузоподъемность:5 кг
- Радиус действия:915 ммУгол поворота:J1: ±360 °, J2: ±360 °, J3: ±165 °, J4: ±360 °, J5: ±360 °, J6: ±360°
- Максимальная скорость:J1: 178 °/сек, J2: 178 °/сек, J3: 178 °/сек, J4: 180 °/сек, J5: 180 °/сек, J6: 180 °/секЛинейная скорость:1 м/с
- Повторяемость:± 0,05 ммУровень шума:65 дБ
- Размер упаковки:450 х 470 х 223 мм
Характеристики Hanwha HCR-12A

- Количество осей:6Грузоподъемность:12 кг
- Радиус действия:1300 ммУгол поворота:J1: ±180 °, J2: -165°-+135 °, J3: -85-.+245 °, J4: ±190 °, J5: ±170 °, J6: ±360°
- Максимальная скорость:J1: 130 °/сек, J2: 130 °/сек, J3: 200 °/сек, J4: 200 °/сек, J5: 200 °/сек, J6: 200 °/секЛинейная скорость:1 м/с
- Повторяемость:± 0,05 ммУровень шума:70 дБ
- Размер упаковки:450 х 470 х 223 мм
Описание
Коллаборативные роботы Hanwha маневренны, точны и просты в управлении. Для управления коботами не требуется специальная квалификация или долгое обучение. Благодаря большому количеству датчиков они абсолютно безопасны для людей. Все коботы Hanwha невелики по размерам, поэтому хорошо вписываются в ограниченные пространства.

Источник: top3dshop.ru
Коботы выполняют за людей особо утомительные и однообразные, а также требующие особой точности и повторяемости движений задачи. В их число входят:
- сборка;
- обслуживание станков;
- проверка;
- дозирование;
- сортировка;
- паллетирование;
- упаковка;
- полировка;
- нанесение клея и лакокрасочных покрытий;
- прошивка;
- пайка;
- сварка;
- многие другие операции.
Отличительные особенности серии Hanwha HCR-A

Источник: top3dshop.ru
Роботы Hanwha HCR-A имеют следующие преимущества перед моделями предыдущей серии:
-
Длина кабеля была увеличена до 10 м. Опционально можно приобрести заводской кабель повышенной гибкости — U-Bend grade. Он пригодится при установке кобота, например, на подвижную платформу.
-
По сравнению с коботами прошлой серии, в HCR-3A и HCR-5A показатель повторяемости улучшен до 0,05 мм. Данный параметр повышает точность работы.
-
Снижен уровень шума, что создает лучшие условия работы для персонала.
-
Шина EtherCAT появилась у всех роботов А-серии. В стандартной линейке шина EtherCAT отсутствовала у HCR-12.
-
Добавилась возможность подключать питание устройства по шине EtherCAT, что расширяет спектр подключаемого оборудования.
-
Появилась возможность установки кобота HCR-12А на плоскости с углом наклона до 30°.
ПО

Источник: top3dshop.ru
Коллаборативные роботы оснащены программным обеспечением Rodi. Управление осуществляется через интерфейс сенсорной панели. Интерфейс состоит из двух блоков: главное меню, в виде вертикально расположенных вкладок, и режим управления, отражающий текущий рабочий процесс.
Программирование коботов осуществляется двумя способами: через главное меню, с указанием перемещений по координатам, или с помощью “прямого обучения”. В процессе “прямого обучения” оператор перемещает конечное звено робота в соответствии с поставленными задачами. Робот запоминает последовательность действий, а затем воспроизводит движения и манипуляции.
Также в программном обеспечении задаются виртуальные ограничения и радиусы движения, для обеспечения безопасности.
Для соединения коботов с различными устройствами дополнительное ПО не требуется. Интеграция происходит по принципу plug and play. После установки захватов и других насадок, кобота можно сразу программировать вышеуказанными способами.
Сравнение коботов Hanwha HRC-A и Universal Robots
Источник: media.xconomy.com
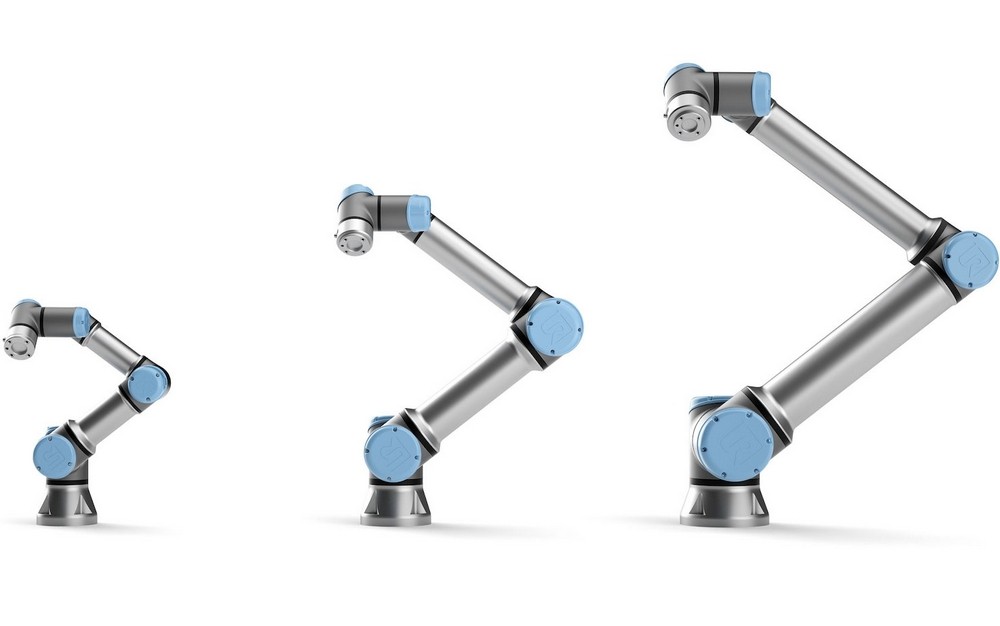
Коботы Universal Robots родом из Дании, первый рабочий экземпляр появился в 2008 году. Также, как и коботы Hanwha, Universal Robots — 6-ти осевые. Цифровой индекс в названии указывает на максимальную грузоподъемность. Так, грузоподъемность старшей модели кобот Hanwha HCR-12A превышает грузоподъемность модели UR10 на 2 килограмма.
Модели незначительно различаются радиусом рабочей зоны: 630 мм, 915 мм и 1300 мм для коботов HRA-3A/5A/12A против 500 мм, 850 мм и 1300 мм для моделей UR3/5/10.
Повторяемость роботов UR последней серии E выше и составляет 0,03 мм, 0,03 мм и 0,05 мм для моделей UR3e, UR5e и UR10e, в том время как на моделях HCR-3A и HCR-5A она ± 0,05 мм. То есть, аналогичные модели UR на 3 и 5 кг точнее HCR-A на две сотых миллиметра, а самая крупная, на 10 кг грузоподъемности, имеет такую же точность, как HCR-A на 12 кг.
При этом коботы Hanwha стоят дешевле. Так, приблизительно за одну и ту же сумму можно купить устройство UR или аналогичного кобота Hanwha и захватное устройство к нему.
Кейсы Top 3D Group по интеграции роботов Hanwha

Одно из направлений деятельности компании Top 3D Group — комплексное внедрение коллаборативных роботов. В рамках этого направления была осуществлена демонстрация коллаборативных роботов Hanwha в условия реального производства.
Автоматизация процессов загрузки-разгрузки станков Haas и Mazak
ООО “Гидронт” производит и обслуживает гидравлическое оборудование. Инженер-роботехник компании Top 3D Group продемонстрировал, как с помощью кобота Hanwha HCR-5 можно автоматизировать процесс загрузки и выгрузки заготовок весом до 10 кг со станками Mazak и Haas.
В рамках демонстрации было показана работа системы безопасности. При касании препятствия, такого как рука человека, робот показывает это световой индикацией — ее цвет сменяется с зеленого на красный, — и останавливается.
На данном видео запечатлен процесс загрузки и разгрузки станка с ЧПУ. В ходе демонстрации оказалось, что для выполнения поставленных задач лучше всего подошел кобот с грузоподъемностью до 12 кг.
Демонстрация программирования робота для обслуживании станка.
Использование коботов Hanwha освобождает рабочих от однообразных действий, вроде загрузки и разгрузки станка с ЧПУ, и позволяет более эффективно использовать рабочее время.
Автоматизация операций Pick-and-Place на станке с ЧПУ
Процесс загрузки станка коботом HCR-5 в условиях реального производства.
Обслуживание станка с ЧПУ коллаборативным роботом Hanwha HCR-5
Крупным планом показаны траектория движения кобота HCR-5 и работа установленного захвата.
Автоматизация станков с ЧПУ мобильным коботом

Инструментальный завод столкнулся с задачей по автоматизации производства. В рамках демонстрации кобот HCR-5 осуществляет загрузку и разгрузку станков. Чтобы кобот мог взаимодействовать с расположенными в два ряда станками, для его перемещений используется транспортировщик Omron. Такое решение, без перестройки несущих конструкций, укладки рельсов и установки подвесов, позволило сократить расходы на модернизацию производства.
Передвижение кобота HCR-5 при помощи автономного мобильного робота Omron LD-60.
Окупаемость

Источник: top3dshop.ru
Окупаемость автоматизации производства с внедрением коллаборативных роботов Hanwha составляет в среднем 1-3 года. Коботы могут работать в режиме 24/7, заменяя от 2 до 6 человек. Затраты на электроэнергию и техническое обслуживание коботов ниже суммарных расходов по выплате заработной платы, больничных и отпускных, страховых взносов, обеспечения персонала спецодеждой.
Купленный в лизинг кобот, работающий в три смены, приносит за первые три года почти 5 млн. рублей одной только прямой экономии, не говоря о косвенной прибыльности от повышения качества и стабильности работы.
Точные сроки окупаемости рассчитываются индивидуально, исходя из стоимости выбранного оборудования и условий его эксплуатации.
Рассчитаем срок окупаемости внедрения робота на ваше производство — оставьте заявку.

Источник: top3dshop.ru
Коллаборативные роботы Hanwha имеют положительный опыт интеграции в производственные процессы, в том числе такие как загрузка, разгрузка и обслуживание станков с ЧПУ. Несмотря на все достоинства, коботы Hanwha имеют ряд особенностей, характерных для подобного типа оборудования.
Преимущества Hanwha HCR-A
-
HCR-A точнее, удобнее и универсальнее моделей предыдущей серии;
-
менее шумные;
-
просты в управлении;
-
быстро интегрируются и перенастраиваются;
-
минимальные инвестиции и средний срок окупаемости в 1-3 года;
-
безопасны для человека;
-
надежны: заявленный производителем срок работы робота составляет как минимум 35 000 часов до первого отказа.
Ограничения
-
ограниченная грузоподъемность (3-12 кг) и досягаемость, по сравнению с промышленными роботами;
-
не подходят для экстремальных условий работ.
Итого
Коллаборативные роботы Hanwha — идеальное решение для небольших компаний, где могут быстро меняться и перестраиваться производственные линии. Они незаменимы там, где важна скорость интеграции и переналадки.









Оставить комментарий