

Роботизированная рука: захватные устройства

Что такое роботизированная рука
Самым распространенный производственный робот — манипулятор или «роботизированная рука». Рука робота состоит из нескольких сегментов, соединенных снабженными шаговыми двигателями или сервоприводами суставами, которые управляются компьютером.
На рабочей части руки расположен эффектор — непосредственно взаимодействующее с объектами устройство. Чаще всего, эффектор — одно из множества возможных захватных устройств, либо инструмент для обработки объектов. О захватах роботов, их разновидностях и применении читайте в этой статье.
Содержание
- Захватные устройства для роботизированных рук
- Классификация
- Разновидности и как выбрать
- Пневматическое/электрическое устройство вращения захвата
- Устройство быстрой смены захвата с клапаном безопасности и без
- Модульный захват
- Параллельные пневматические/электрические захваты
- Угловые пневматические/электрические захваты
- Захваты с надувными камерами
- Однопальцевые захваты
- Пневматический магнитный захват
- Радиальные пневматические/электрические захваты
- Трехлучевые пневматические/электрические захваты
- Вакуумные захваты
- Сенсоры для захватов
- Кейсы применения
- Выводы
Захватные устройства для роботизированных рук
 Источник: roboticsandautomationnews.com
Источник: roboticsandautomationnews.com
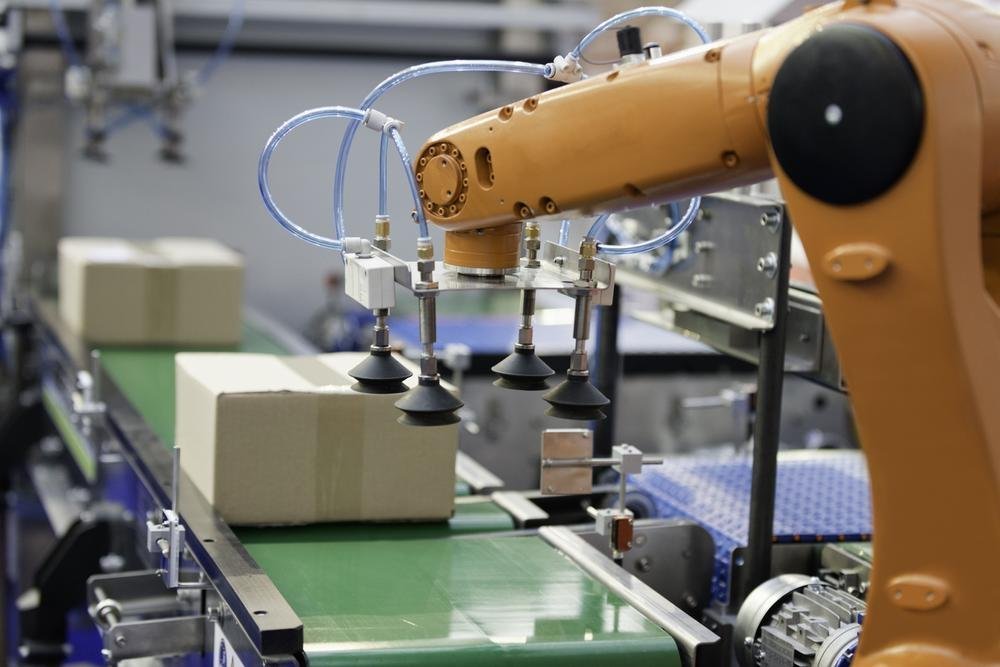
Эффектор робота — это физический интерфейс между рукой робота и обрабатываемой деталью. Этот инструмент на конце руки (EOAT: End of Arm Tooling) является одной из наиболее важных частей робота.
Захват — разновидность эффектора, предназначенная для удержания и перемещения деталей. Захват входит в прямой контакт с продуктом, поэтому важно выбрать правильный тип захвата, наиболее подходящий для целевых объектов, который сможет надежно удерживать и не повредить их.
 Источник: top3dexpo.ru, демонстрация работы робота Hanwha на выставке Top 3D Expo.
Источник: top3dexpo.ru, демонстрация работы робота Hanwha на выставке Top 3D Expo.
Роботизированные руки часто имеют встроенные сенсоры, которые сообщают компьютеру, насколько сильно робот захватывает определенный объект. Это не даёт роботу уронить или сломать обрабатываемую деталь.
 Источник: canadamakes.ca
Источник: canadamakes.ca
Другие существующие виды эффекторов: сварочное, фрезерное или сверлильное оборудование, шуруповерты и гайковерты, распылители для краски или специальные захваты для определенных типов объектов, 3D-печатные экструдеры, строительный инструмент.
Существую также антропоморфные захваты, повторяющие кисть человеческой руки, но они почти не применяются в промышленности (до тех пор, пока антропоморфные роботы не задействованы на производстве), а предназначены для исследовательских и медицинских целей, например — как часть протезов.
Сегодня разработчики придерживаются двух принципиально разных подходов к проектированию эффекторов: универсальные захваты под любой тип инструмента или задачи, либо быстросменные узкоспециализированные захваты. Каждый подход имеет как свои достоинства, так и недостатки, поэтому проектировщикам роботизированных производств приходится учитывать экономическую целесообразность обоих подходов. На сегодняшний день наиболее распространенными являются узкоспециализированные захваты.
 Источник: robotics.org
Источник: robotics.org
Захваты различаются по следующим типам:
По принципу действия:
- механические;
- магнитные;
- вакуумные;
- с эластичными пневматическими или гидравлическими камерами.
 Источник: destaco.com
Источник: destaco.com
По характеру базирования объектов:
- базирующие (перемещающие объекты в заданную область);
- перебазирующие (способные изменять положение объектов в том числе относительно себя);
- центрирующие;
- поддерживающие;
- фиксирующие.
 Источник: robotiq.com
Источник: robotiq.com
По характеру крепления:
- несменяемые;
- сменные;
- быстросменные;
- с автоматической заменой.
 Источник: ati-ia.com
Источник: ati-ia.com
По виду управления:
- неуправляемые;
- командные;
- жестко программируемые;
- адаптивные.
 Источник: therobotreport.com
Источник: therobotreport.com
По типу губок:
- жесткие;
- регулируемые;
- упругие;
- пластичные.
 Источник: therobotreport.com
Источник: therobotreport.com
По типу привода:
- пружинные;
- пневматические;
- гидравлические;
- электромеханические.
 Источник: schneider-company.com
Источник: schneider-company.com
Как выбрать
 Источник: morali-gmbh.de
Источник: morali-gmbh.de
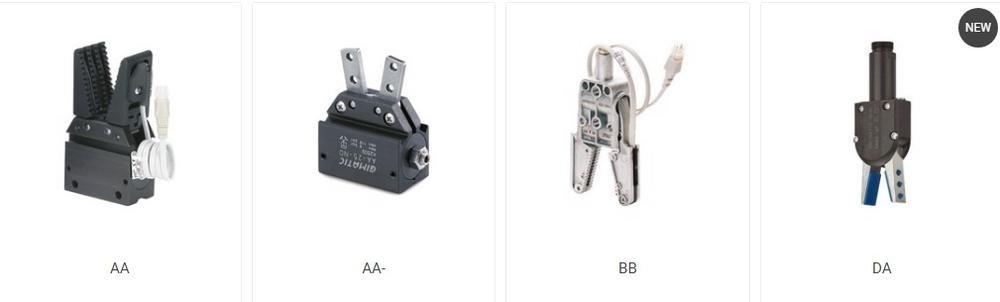
Комплектация и принципиальные схемы могут сильно различаться у разных производителей. Рассмотрим типичную классификацию на примере Gimatic.
Комплектация EOAT выполняется с помощью отдельного приложения, автоматически учитывающего всю необходимую оснастку при выборе захвата. Каждая часть EOAT оснащена RFID-меткой, а сам захват – RFID-контроллером, автоматически считывающим метки и не допускающим неправильной сборки.
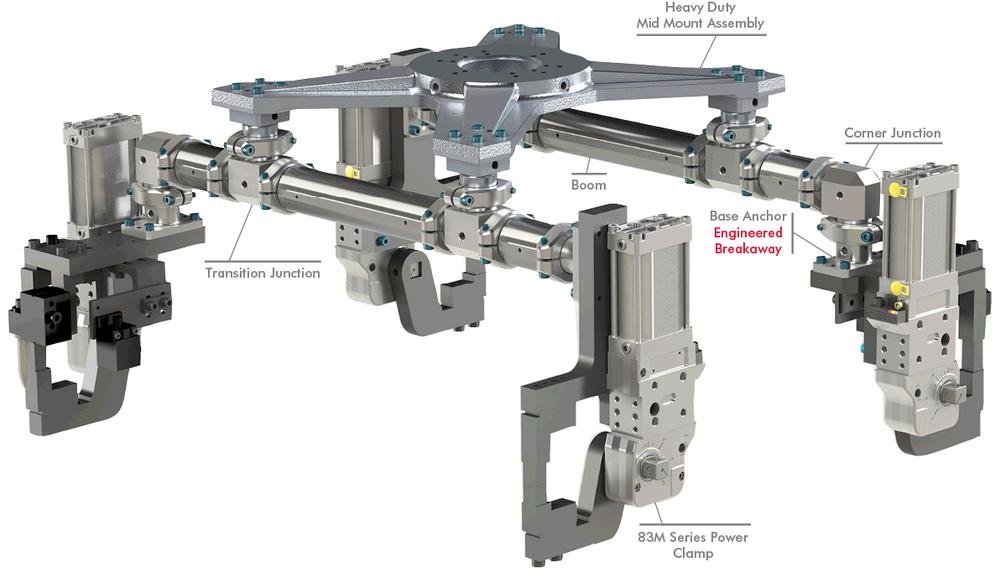
EOAT состоит из устройства на стороне робота и на стороне захвата, управляющего устройства (контроллера), интерфейсных кабелей, пневматической или электрической системы. Кроме того, захват можно оснастить дополнительной подвеской, сенсорами, линейными приводами и направляющими, отдельным блоком питания, тормозной системой.
Пневматическое/электрическое устройство вращения захвата:
- Вращения захвата;
- Наклона захвата;
- Поворота захвата;
- Поворота стола.
Устройства предназначены как для вращения, наклона или поворота как самих захватов в разных режимах, так и для вращения стола с деталью.
 Источник: shop.gimatic.com
Источник: shop.gimatic.com
Устройство быстрой смены захвата с клапаном безопасности и без:
- Модуль идентификации RFID;
- Устройство быстрой смены захвата со стороны робота/захвата;
- Устройство автоматического центрирования со стороны робота/захвата;
- Пневматический привод устройства быстрой смены захвата;
- Устройство быстрой смены захвата с пружинами.
Такой тип устройства обеспечивает быструю смену захвата на роботизированной руке, контроль правильности комплектации, защиту от избыточного давления, совместимость с роборуками разных производителей.
 Источник: shop.gimatic.com
Источник: shop.gimatic.com
Модульный захват:
- Монтажная база для EOAT;
- Монтажные наборы.
Позволяет самостоятельно создать из комплектующих захват любого размера, разных типов и грузоподъемности.
 Источник: shop.gimatic.com
Источник: shop.gimatic.com
Параллельные пневматические/электрические захваты:
Обладают высокой точностью, повторяемостью и нагрузочной способностью в самых широких пределах. Могут дополнительно комплектоваться другим оборудованием, например — сверлильным или сварочным агрегатом.

 Источник: shop.gimatic.com
Источник: shop.gimatic.com
Угловые пневматические/электрические захваты:
Обладают большим усилием сжатия, что применимо, например, для резки металла. С другой стороны, возможность использования различных сенсоров дает возможность крайне деликатного и высокоточного обращения с деталью. Как и параллельные захваты, угловые могут комплектоваться дополнительным оборудованием.

 Источник: shop.gimatic.com
Источник: shop.gimatic.com
Захваты с надувными камерами:
Незаменимы при работе с хрупкими предметами, например — для перемещения стеклянных банок или бутылок, фарфора, лабораторного стекла. Могут фиксировать деталь как снаружи, так и изнутри.
 Источник: shop.gimatic.com
Источник: shop.gimatic.com
Однопальцевые захваты:
- Однопальцевый пневматический захват;
- Однопальцевый угловой пневматический захват;
- Однопальцевый перпендикулярный пневматический захват.
 Источник: shop.gimatic.com
Источник: shop.gimatic.com
Пневматический магнитный захват:
 Источник: shop.gimatic.com
Источник: shop.gimatic.com
Радиальные пневматические/электрические захваты:
По назначению схожи с угловыми, но, как правило, обладают возможностью самоцентрирования.
 Источник: shop.gimatic.com
Источник: shop.gimatic.com
Трехлучевые пневматические/электрические захваты:
Предназначены для надежной фиксации цилиндрических деталей.
 Источник: shop.gimatic.com
Источник: shop.gimatic.com
Вакуумные захваты:
Служат для работы с хрупкими и гладкими деталями, например, с автомобильными стёклами или листами поликарбоната.
 Источник: shop.gimatic.com
Источник: shop.gimatic.com
Сенсоры для захватов:
- Магнитные;
- Индуктивные;
- Ультразвуковые;
- Оптические;
- Аналоговые;
- Перегрузки;
- Для хрупких деталей.
 Источник: shop.gimatic.com
Источник: shop.gimatic.com
Кейсы применения
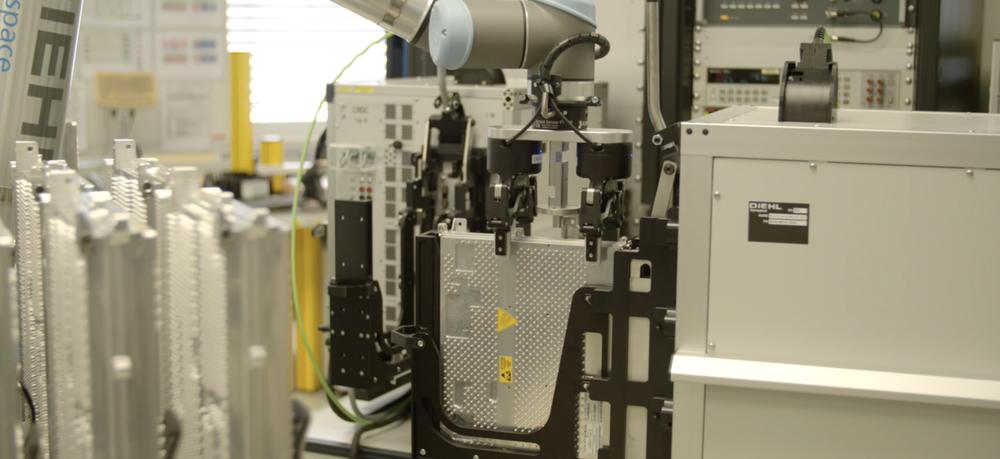
Автоматизация контроля качества, DIEHL Aerospace, Germany
 Источник: blog.robotiq.com
Источник: blog.robotiq.com
Diehl Aerospace производит компьютерные системы для Airbus A350 XWB. После получения крупного контракта на этот самолет, перед руководством компании встала задача резко увеличить производительность отдела тестирования качества. Был выбор: добавить дорогую ночную смену из «живых» сотрудников, увеличить срок выполнения контракта или автоматизировать ряд процессов.
 Источник: robotiq.com
Источник: robotiq.com
Компания Diehl Aerospace выбрала роботизированный манипулятор Universal Robots UR10, оснащенный парой адаптивных захватов Robotiq 2F-85 и датчиком крутящего момента FT 300 для автоматизации приемочных испытаний. Робот отвечает за точную вставку хрупкого корпуса компьютера в испытательное оборудование, причем каждый электрический интерфейс, вход, выход и датчик проходят двойную проверку.
 Источник: blog.robotiq.com
Источник: blog.robotiq.com
«Сначала мы думали о решении проблемы традиционными способами, но, после многочисленных посещений выставок и глубоких исследований, мы решили использовать коллаборативного робота, так как он более гибок в задачах и прост в использовании»,
— говорит Хайко Русс, руководитель отдела промышленного производства в Diehl Aerospace.
Сборка капсул для кофемашин, GIMATIC в TECMES
 Источник: gimatic.com
Источник: gimatic.com
Tecmes не устраивали текущее качество и низкая скорость сборки капсул, неравномерность уплотнения кофейного порошка и высокое энергопотребление существующего оборудования. По этой причине компания, базирующаяся в Vaiano Cremasco (коммуна Вайано-Кремаско, область Кремона, регион Ломбардия, Италия), обратилась к Gimatic за поставкой пневматических захватов для позиционирования и перемещения капсул.
 Источник: emicorp.com
Источник: emicorp.com
В основном это модель XP20-A - захват, разработанный для нужд пищевой промышленности. XP20-As оснащены челюстями из нержавеющей стали и направляющими из ацетальной смолы. Последнее необходимо для надлежащего уплотнения и предотвращения попадания порошка кофе (и других продуктов на пищевом производстве) в механизм захвата. Также Gimatic оснастил Tecmes высокоэффективными компактными захватами (SGP имеют эффективность использования энергии 95%) и высокоскоростными захватами (HS работают с частотами от 5 до 6 Гц).
Автоматизация полировки стекла, Saint-Gobain, France
 Источник: robotiq.com
Источник: robotiq.com
На заводе Сен-Гобен в Сюли-сюр-Луар, Франция, использование человеческого труда приводило к высокой стоимости готового продукта. В стремлении сделать производство эффективнее и освободить сотрудников от повторяющихся задач, компания Saint-Gobain захотела автоматизировать изнурительный процесс полировки стекла. Для решения задачи надо было запрограммировать сложные движения, отличающиеся для каждой небольшой серии изделий из стекла.
Используя запись траектории датчика крутящего момента Robotiq FT 300, оператор «показывает» устройству последовательность движений, Universal Robots UR10 записывает и затем воспроизводит движение оператора. Так увеличивается скорость и точность обработки, а операторы меньше страдают от профессиональных расстройств опорно-двигательного аппарата, что, в конечном итоге, существенно уменьшает себестоимость продукции.
 Источник: robotiq.com
Источник: robotiq.com
«При изготовлении многослойного бронированного стекла оператору приходилось тщательно полировать стеклянные поверхности, повторяя одно и то же движение снова и снова», – объясняет Игнасио Санчес, менеджер по цифровому производству, – «Программирование движений робота, который должен следовать за человеком – сложная задача. Мы смогли упростить ее с функцией записи движений датчика FT 300. Сейчас мы можем выполнить за две 8-часовые смены тот же объем работ, на который раньше требовалось три».
Бионический протез, Тилли Локки, Великобритания
 Источник: metro.news
Источник: metro.news
Благодаря бионической роботизированной руке от компании Open Bionics, 13-летняя Тилли Локки, потерявшая кисти рук из-за менингита, может без особых усилий делать макияж, брать и держать предметы, чистить зубы, рисовать и играть.
«С 2016 года она протестировала около восьми различных вариантов, которые постепенно изменялись, чтобы стать лучше для людей, находящихся в таком положении»,
— говорит её мама.
Помимо протезов, такой тип захватов используется также при создании антропоморфных роботов — андроидов, одно из важнейших свойств которых — приспособленность к использованию человеческих инструментов, делающая их универсальными в применении.
Андроиды могут широко применяться в испытаниях транспортных средств и любых типах работ, где важны недоступные другим роботам компактность, маневренность и универсальность.
Выводы
 Источник: hamer-fischbein.com
Источник: hamer-fischbein.com
Выбор
Не бывает универсальных захватов, которые одинаково хорошо справлялись бы с любой работой — применяемые захваты роботов должны соответствовать размеру, весу и жесткости объектов, с которыми они работают.
Как и в случае с роботами в целом, разработчики и пользователи EOAT должны учитывать очень разные, многочисленные и иногда противоречащие друг другу требования — к скорости работы, точности, силе воздействия, форме детали, типу выполняемых работ и обеспечению безопасности.
Поставщики робототехники все чаще предлагают комплексные решения, покрывающие широкий сегмент задач, в том числе датчики и программное обеспечение. Большое внимание сегодня уделяется разработке эффекторов, которые просты в установке и использовании, а также могут быть установлены на манипуляторы любых производителей.
 Источник: emicorp.com
Источник: emicorp.com
Перспективы
Среди последних трендов в развитии роботизированных манипуляторов — использование искусственного интеллекта, позволяющее добиться ещё большей простоты и скорости обучения робота необходимым действиям, гибкости в решении сложных задач. Расширяется и сфера использования: по данным Ассоциации робототехнической промышленности, использование EOAT в 2017 выросло на 14% в автопроме и до 20% в других областях.
Модернизация предприятий с применением автоматизированных систем значительно увеличивает производительность, именно поэтому применение робототехники — обязательный элемент развития любого производства, фактор обеспечивающий не только конкурентные преимущества, но зачастую и само выживание бизнеса.
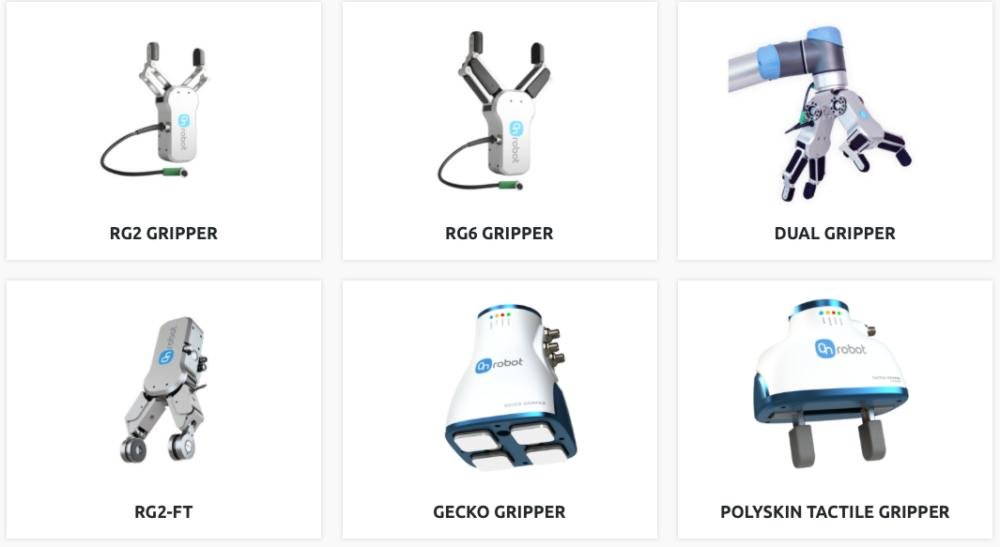
Рекомендуемое оборудование
Производителей робототехники много, но мы советуем выбирать оборудование хорошо известных и зарекомендовавших себя брендов, таких например, как Kuka, Fanuc, Hanwha. Они могут комплектоваться эффекторами разных производителей и выполнять множество различных операций в разных областях.
Обратитесь в Top 3D Shop чтобы выбрать и приобрести максимально подходящее для ваших целей и задач робототехническое оборудование, в чем вам всегда помогут наши специалисты.
Подписывайтесь на наш телеграм-канал с отборными кейсами Роботизации и Автоматизации со всех уголков мира:
Рекомендуемые товары



-
10 июня 2022Отличная статья! Искал информацию о захватах роботов в учебниках по мехатронике и робототехнике. Везде приводят устаревшие данные, либо просто абстрактные математические схемы. У вас же получился очень современный и наглядный обзор. Спасибо! Прекрасная работа!






Оставить комментарий