

Коллаборативные роботы в автоматизации работы станков с ЧПУ
Во многих производственных процессах вместо людей используются промышленные роботы – высокоспециализированные устройства, каждое из которых способно производить одну-две операции. Однако, экономически выгодным это оказывается лишь там, где партии производимых изделий измеряются десятками и сотнями тысяч штук – в производстве автомобилей, бытовой электроники, лекарств, фасованных пищевых продуктов и некоторых других. Для малых предприятий, не способных обеспечить такие масштабы, использование промышленных роботов нецелесообразно.
И совсем другое дело — коботы, то есть роботы коллаборативные, отличающиеся от обычных промышленных роботов не только универсальностью, но и безопасностью, и простотой управления.
Коботы способны заменить человека практически повсюду, где работа сводится к повторяющимся движениям – от приготовления блинчиков до 3D-сканирования, металлообработки и погрузочно-разгрузочных работ. Особенно успешным себя показывает использование коботов в автоматизации обслуживания станков с числовым программным управлением.
Читайте статью, чтобы узнать больше.
Содержание
- Введение
- Основные параметры коботов
- Оборудование
- YASKAWA MOTOMAN
- KUKA Roboter
- Hanwha
- Universal Robots
- KAWASAKI
- Заключение
Введение
Системы обслуживания станков в автоматическом режиме играют большую роль в автоматизации производства и контроля качества продукции. Обслуживание станков коботами включает в себя такие процессы, как загрузка заготовок в станок и удаление обработанных — это монотонные повторяющиеся операции, ручное выполнение которых приводит к быстрому утомлению операторов и повышению процента брака. Благодаря простоте и повторяемости, эти операции идеально подходят для выполнения роботами.
Промышленные роботы сконструированы так, чтобы выполнять поставленные перед ними задачи максимально быстро и эффективно. Они обладают значительной массой, двигаются с высокой скоростью и создают угрозу жизни и здоровью находящихся рядом людей. Поэтому их устанавливают в специально отведенных местах, окрашивают в яркие цвета и монтируют ограждения в зоне действия, чтобы не подвергать опасности людей. При любом физическом взаимодействии человека с промышленным роботом механизм необходимо предварительно отключить.
Коллаборативные роботы, коботы, оснащены датчиками, которые обнаруживают контакт с человеком и моментально останавливаются, не причиняя ему вреда. Также коботы отличаются безопасным дизайном – закругленные ребра, отсутствие острых углов, малая масса робота и низкие скорости работы позволяют устанавливать их непосредственно на рабочих местах, исключая необходимость выделения роботам отдельной площадки, огороженной от людей.
Программирование коботов намного проще, по сравнению с промышленными роботами, и включает элементы прямого управления — оператор может руками передвигать манипулятор, а кобот “запомнит” эти движения, внесет их в программу. Характерной чертой коботов является также открытая архитектура, позволяющая вносить необходимые изменения без участия производителя в программную и аппаратную часть. Вакуумные и механические захваты, техническое зрение, программное обеспечение, комплексные узкоспециализированные решения – все это доступно для покупки и дополнения приобретенного ранее кобота.
Также следует отметить, что коботы грузоподъемностью 3-5 кг дешевле своих промышленных сородичей, 10-15 кг — стоят приблизительно также. Их основные пользователи – компании, выпускающие продукцию малыми и средними сериями, то есть испытывающие потребность в частой перенастройке производственной линии.
Основные параметры коботов
Грузоподъёмность
В перечне технических характеристик обычно указывается грузоподъемность – максимальный вес, которым кобот может оперировать без риска поломок. Реальный вес, с которым работает кобот, – это грузоподъёмность минус вес используемых насадок и инструментов.
Радиус рабочей зоны
Радиус рабочей зоны, или “досягаемость” – это расстояние между центром основания кобота и максимально удалённой точкой, до которой способен дотянуться его манипулятор.
Повторяемость
Повторяемость – это максимальная величина отклонения при повторяющихся движениях. Данный параметр является одной из важнейших характеристик промышленных роботов вообще и коботов в частности.
Коботы обычно программируются путем обучения или ручной настройки, так что повторяемость критически важна не только в работе, но и в подготовке к ней.
Собственный вес кобота
Собственный вес кобота традиционно ниже, чем вес промышленных роботов, за счет применения в его конструкции более легких современных материалов. Эта характеристика позволяет оценить, каких усилий потребует перемещение самого робота с места на место, при установке или переназначении на другой участок производства.
Безопасность
Вопрос безопасности очень непрост. Обычно оценку уровня безопасности проводят эксперты, выдающие по итогам обследования соответствующий сертификат.
Одно из самых авторитетных агентств в области промышленной безопасности — TÜV SÜD — “Объединение технического надзора” (Мюнхен + 800 филиалов и уполномоченных организаций по всему миру).
Необходимо помнить, что безопасность характеризуется множеством различных переменных. Для запуска производства необходимо выполнить полную оценку рисков в соответствии с актуальными нормами безопасности, в том числе ISO/TS 15066.
Лёгкость программирования
“Лёгкость” характеристика субъективная, её сложно определить количественно. Тем не менее, при сравнении по этому параметру коботов и промышленных роботов, коботы показывают меньшую требовательность к квалификации оператора и количеству необходимого для перепрограммирования времени.
Оборудование
Fanuc

Fanuc Co., Ltd. – японская компания, специализирующаяся на производстве станков, лазерного оборудования и промышленных роботов. Её продукция используется на всех континентах, среди клиентов компании представители практически всех отраслей – от Coca-Cola и Вимм-Билль-Данн до Apple, General Motors и Boeing.
Название компании это акроним от «Fuji Automation NUmerical Control». Она была основана в 1956 году, а своего первого робота выпустила в 1972. Почти сразу роботы Fanuc получили широкое признание, и в настоящий момент компания входит в число ведущих мировых производителей робототехники. Первый коллаборативный робот компании был представлен в 2015 году.
Fanuc CR
 Источник: top3dshop.ru
Источник: top3dshop.ru
При создании коллаборативных роботов компания использовала весь свой более чем полувековой опыт разработки и эксплуатации промышленных роботов. Её коботы отличаются от коботов других производителей не только выдающимися значениями повторяемости, но и наличием датчиков изображения FANUC Vision Sensor или FANUC 3D Area Sensor, позволяющих распознавать изделия и определять их форму.
Кроме того, именно Fanuc производит кобота с наивысшей в настоящее время грузоподъёмностью. Это CR 35iA, способный работать с грузами весом до 35 кг.
Характеристики
Обслуживание лазерных режущих станков с ЧПУ
YASKAWA MOTOMAN
Yaskawa Motoman, дочерняя компания японской корпорации Yaskawa Electric, основана в 1989 году в Майамисбург, штат Огайо, и в настоящее время является одним из ведущих американских производителей робототехники. За тридцать лет работы ею произведено более 400 000 промышленных роботов Motoman и более 40 миллионов разнообразных сервоприводов и инверторных приводов.

На сегодняшний день продуктовая линейка включает более 150 различных моделей промышленных манипуляторов, дельта-роботов и полностью роботизированных систем для конкретных применений, таких как сварочные роботы, например.
HC-10DT

Коллаборативный робот HC10DT пригоден для решения самых разнообразных задач, среди которых – замена человека при обслуживании станков ЧПУ. Программирование осуществляется как при помощи сенсорного экрана, так и посредством ручного управления.
HC10DT легко интегрируется с существующей инфраструктурой автоматизации и, как любой кобот, может работать без дополнительных мер защиты.
Характеристики
Обслуживание токарного станка с ЧПУ
KUKA Roboter

KUKA Roboter – немецкий производитель промышленных роботов со штаб-квартирой в Аугсбурге. Один из крупнейших поставщиков промышленных роботов, входит в тройку ведущих поставщиков роботов для автомобильной промышленности.
Первый промышленный робот KUKA был создан в 1973 году. Через сорок лет фирма представила первого кобота – LBR iiwa.
LBR iiwa
 Источник: top3dshop.ru
Источник: top3dshop.ru
LBR iiwa – первый серийно выпущенный коллаборативный робот. LBR – сокращение от немецкого Leichtbauroboter (робот легкой конструкции), iiwa – от английского intelligent industrial workassistant (интеллектуальный промышленный ассистент). Кобот имеет две версии, грузоподъемностью 7 кг и 14 кг.
LBR iiwa в состоянии выполнять не только те же операции, что и обычные промышленные роботы аналогичной грузоподъёмности, но и производить гораздо более изощрённые манипуляции, благодаря большему числу степеней свободы.
Характеристики
Сборка промышленного робота KR QUANTEC
Hanwha

Компания, как разработчик робототехники, начала свое существование в 1977 году, когда корпорацией Samsung было организовано отдельное предприятие Samsung Techwin, призванное заниматься инновациями в сфере военной промышленности и авиации. В 2015 г. Samsung продал Techwin корпорации Hanwha Group, после чего она стала официально именоваться Hanwha Techwin.
Своего первого коллаборативного робота – HCR-5 – компания выпустила марте 2017. Вскоре линейка коботов пополнилась моделями HCR-3 и HCR-12.
HCR

Коллаборативные роботы серии HCR – эффективное средство снижения затрат, как инвестиционных, так и операционных. Они легко программируются, просты в управлении и, будучи более безопасными, являются отличной заменой традиционным промышленным роботам в некоторых задачах, особенно при частой необходимости переназначения их с одной задачи на другую.
Коботы серии HCR способны заменить человека при обслуживании любого станка с ЧПУ на любом производстве, будучи ограничены только показателями номинальной нагрузки.
Характеристики
Обслуживание токарного станка с ЧПУ
Universal Robots
Компания Universal Robots была основана в 2005 студентами Университета Дании, которые задались целью сделать роботизированные технологии доступными для малых и средних предприятий. Интересная особенность компании в том, что, не имея опыта производства традиционных промышленных роботов, она сразу взялась за разработку коботов.
Первый кобот компании был изготовлен в 2008 году, а в 2019 объем продаж составил более 35 000 единиц. В настоящий момент коботы от Universal Robots работают почти на 50 000 производственных участках по всему миру.
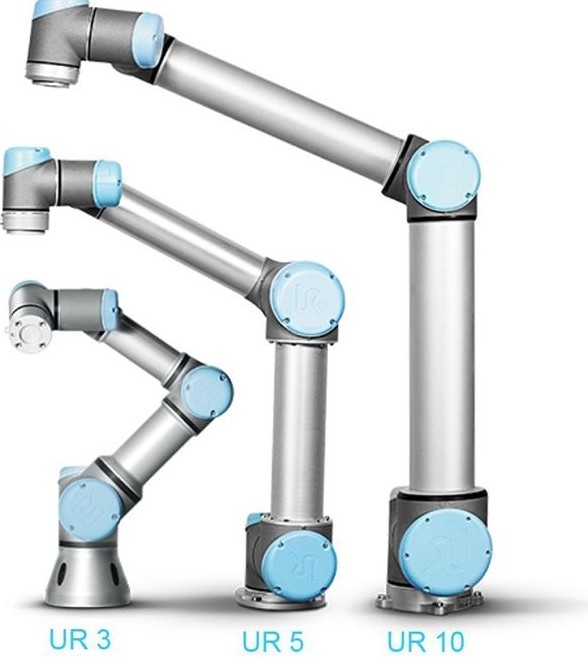
UR
 Источник: top3dshop.ru
Источник: top3dshop.ru
Характеристики
Обслуживание токарно-револьверного станка с ЧПУ
KAWASAKI

Kawasaki Robot – подразделение японской корпорации Kawasaki Heavy Industries, специализирующееся в области производства промышленных роботов, электротехники, энергетического машиностроения и информационных технологий.
Департамент был образован в 1968 и уже через год начал выпуск промышленных роботов. В июне 2015 года, компания выпустила свой первый коллаборативный робот duAro.
duAro

Наиболее заметная особенность duAro, которая сразу бросается в глаза, – это два SCARA-манипулятора, благодаря которым кобот может производить более многочисленные манипуляции, нежели его традиционные “однорукие” конкуренты.
Другой отличительной особенностью duAro является выдающийся показатель повторяемости, величина которого в разы ниже показателей конкурентов. Такая величина обусловлена тем обстоятельством, что duAro создавался для использования в первую очередь на предприятиях электронной промышленности, где допустимые отклонения существенно меньше, нежели на металлообрабатывающих производствах.
Применение в устройстве схемы SCARA обеспечивает повышенную точность и повторяемость, но при этом робот ограничен в движениях и досягаемости.
Характеристики
Установка компонентов на электронную плату
Заключение
Станки с ЧПУ повышают эффективность производства, но не могут исключить человека из производственного процесса. Промышленные роботы позволяют решить эту проблему, беря на себя обслуживание станков и так помогая автоматизировать производство полностью.
Использование обычных промышленных роботов сопряжено с рядом существенных сложностей.
Во-первых, они не приспособлены для совместной работы с человеком и, представляя для него опасность, требуют специально выделенного и огороженного пространства.
Во-вторых, традиционные промышленные роботы требуют участия специально обученных специалистов всякий раз, когда требуется хотя бы небольшая корректировка производственного процесса, для перепрограммирования.
Использование коботов позволяет избежать указанных сложностей и сопряженных с ними затрат. Для человека кобот безопасен, он не требует выделения закрытого от людей участка. Программирование организовано таким образом, что специальные знания не нужны — достаточно навыков, которые можно приобрести за несколько часов. Кобот может быть встроен в любой производственный процесс быстро и без дополнительных затрат.
Таким образом, складывается следующая ситуация:
- Традиционные роботы и коботы сопоставимы по цене.
- Традиционные роботы демонстрируют более высокие показатели грузоподъёмности, ресурса и производительности.
- Коботы требуют существенно меньших затрат на инсталляцию и переналадку, обучение персонала или участие сторонних специалистов.
Промышленные роботы хороши на тех участках производства, где необходима большая сила и высокий темпа работы. Коботы же — лучший помощник для живого персонала, для тех участков, где необходимо участие или наблюдение человека, — там они значительно увеличивают производительность. Также коботы занимают мало места и хороши там, где пространство для работы ограничено — на малых предприятиях, в мастерских и КБ.
Рекомендуемые товары








Оставить комментарий