

Роботы KUKA для производства, их типы и возможности

Содержание
- История KUKA
- Продукты KUKA
- Классификация роботов
- Промышленные роботы
- Линейные кинематические системы
- Портал лазерной резки
- Периферийные устройства
- Системы энергоснабжения
- Машинное зрение KUKA 3D
- Линейные блоки
- Позиционеры и эффекторы
- Программирование роботов KUKA
- Кейсы применения роботов KUKA
- Как выбрать робота
- Заключение
История KUKA
 Источник: kuka.com
Источник: kuka.com
История KUKA началась в 1898 году с Иоганна Иосифа Келлера и Якоба Кнаппича, основавших в Аугсбурге завод по производству ацетиленового газа для бытового и уличного освещения. Всего через несколько лет после основания компании, повсеместное внедрение электричества привело к резкому падению цены на ацетиленовый газ. Несмотря на это, Keller und Knappich GmbH расширяет свое производство, чтобы обеспечить газом новую технологию: кислородно-ацетиленовую сварку. С начала XX века, для экономии букв в телеграфных сообщениях, компания стала использовать привычное сегодня название KUKA.
-
С 1920 года компания KUKA, используя свой многолетний опыт в сварке и резке металла, стала ведущим немецким производителем больших контейнеров и специализированных автомобильных кузовов для коммунальной техники. Полученные средства KUKA инвестирует в точную механику – от передовых для того времени пишущих машинок до машин для текстильной промышленности.
-
С 1950 годов прошлого века компания занимается автоматическими сварочными линиями, работающими на производстве холодильников и стиральных машин. В 1956 KUKA, совместно с Volkswagen AG, устанавливает первую в мире многоточечную сварочную линию для автомобильного производства.
-
В 1971 году первая в Европе роботизированная сварочная линия построена для Daimler-Benz. Считается, что именно с этого момента в компании увидели будущее робототехники и решили приложить все усилия, чтобы занять этот, пока еще пустой, рынок.
-
1973 – FAMULUS – первая роботизированная разработка от KUKA. Первый робот с шестью осями и с электроприводом стал настоящим прорывом для автомобильной промышленности.
 Источник: techmonitor.hu
Источник: techmonitor.hu
-
1985 – KUKA представляет роботизированный манипулятор Z-образной формы, конструкция которого имеет три поступательных и три вращательных движения, что в сумме дает шесть степеней свободы.
-
1996 – На Ганноверской выставке KUKA представила первый в мире роботизированный контроллер на базе ПК с операционной системой Windows CE. Впервые для оператора стало возможным управлять роботом в режиме реального времени через устройство в виде 6D-мыши. Пользовательский интерфейс KUKA также позволял выполнять программирование сложных последовательностей действий.
-
1999 – KUKA представляет дистанционную диагностику и управление для промышленных роботов. Эта технология позволила исправлять и устранять ошибки через Интернет, а также проложила дорогу совершенно новым продуктам компании: IaaS (инфраструктура как сервис), PaaS (платформа как сервис), SaaS (сервис как услуга) и концепции гибкого производства «Smart factory».
-
2000 – KUKA представляет первый свободно-программируемый PLC-контроллер, соответствующий стандарту IEC 611310.
-
2004 – Внедрение технологии RoboTeams позволяет нескольким роботам KUKA беспрепятственно работать вместе, занимая на 20% меньше места.
-
2005 – KUKA разрабатывает интеллектуальную технологию Safe Robot, позволяющую рабочим безопасно входить в защищенную зону в рабочем пространстве промышленного робота. Safe Robot заставляет машину остановиться, если человек или препятствие пересекают его путь движения.
-
2006 – KUKA выпускает линейку легких 7-осевых роботов, которые весят всего 14 кг. Обучение робота осуществляется путем ручного управления непосредственно манипулятором.
-
2007 – сверхмощный KUKA KR 1000 Titan – первый промышленный робот грузоподъемностью 1000 кг, что подтверждено Книгой рекордов Гиннесса.
-
2012 – KUKA запускает серию малых высокоточных роботов KR Agilus.
-
2013 – Выпущен первый серийный коллаборативный робот, пригодный для совместной работы с человеком «LBR iiwa» – «интеллектуальный помощник на производстве».
-
2014 – KUKA открывает новый завод по производству роботов в Шанхае. Также Reis GmbH & Co. KG Maschinenfabrik становятся частью KUKA AG. Другим приобретением был Alema Automation SAS, поставщик решений для автоматизации в аэрокосмической промышленности. А благодаря слиянию с Swisslog Holding AG, KUKA получает доступ к таким особенно привлекательным рынкам, как складская логистика и индустрия здравоохранения. Обновленная компания стала именоваться KUKA Industries GmbH & Co, сохранив при этом хорошо известный бренд «KUKA».
 Источник: techmonitor.hu
Источник: techmonitor.hu
Продукты KUKA
 Источник: irsrobotics.com
Источник: irsrobotics.com
Сегодня KUKA создает линейку продуктов, исходя из концепции объединения передовых идей мехатроники с облачными технологиями и мобильными платформами. Интеллектуальные решения для автоматизации и сотрудничество со всеми подразделениями заказчика позволяют KUKA не только продавать отдельное оборудование, но и создавать полные производственные линии. Основными продуктовыми направлениями KUKA являются:
-
Робототехнические системы – промышленные роботы в широком диапазоне версий, с различной грузоподъемностью и для любого применения в любой отрасли.
-
Производственные машины – позволяют интегрировать стандартизированные системы и компоненты в индивидуальные производственные процессы.
-
Производственные системы KUKA – консультация, планирование и разработка соответствующих процессов и систем полного цикла.
-
Мобильность – движущая сила Industrie 4.0. KUKA разрабатывает концепции мобильности для всех этапов промышленного производства.
-
Технологические процессы – от специальных сварочных процессов до пайки и других методов соединения.
Классификация роботов
 Источник: abr.ijs.si
Источник: abr.ijs.si
Разделение промышленных роботов по категориям у KUKA достаточно условное, модели из разных классов могут с одинаковым успехом использоваться в одной и той же задаче. KUKA придерживается философии, что комплексное роботизированное решение должно подбираться под производственную задачу, а не наоборот, когда для робота пытаются придумать способы использования.
Соответственно, роботы KUKA имеют большую вариативность в способах применения, смена или корректировка выполняемой задачи для них вполне естественный процесс. Также KUKA предпочитает рассматривать каждое свое устройство не как отдельный механизм, а как часть модульной производственной линии, которая может быть гибко перестроена на выпуск любой продукции. Кроме того, модели различных классов могут быть смонтированы в качестве единого устройства. Например, роботизированный манипулятор может быть установлен на мобильной или портальной платформе.
Промышленные роботы
 Источник: kuka.com
Источник: kuka.com
Ниже представлены классы промышленных роботов KUKA, с таблицами отличий разных моделей.
Маленькие роботы (до 10 кг)
 Источник: kuka.com
Источник: kuka.com
Эти компактные высокоскоростные устройства предназначены для прецизионной работы с миниатюрными деталями в производственных ячейках размером всего 600 x 600 мм. Роботы серии AGILUS идеально подходят для сборки компонентов в электронной промышленности, высокоточной обработки, крепления винтами, склеивания, упаковки и проверки. KUKA AGILUS выпускаются в вариантах для обычного производства, для чистого производства, для работ в стерильной среде, а также в водонепроницаемом и взрывозащищенном исполнениях.
| KR 3 R540 | KR 6 R700 | KR 6 R900 | KR 10 R900 | KR 10 R1100 | |
|
Полезная нагрузка, кг |
3 | 6 | 6 | 10 | 10 |
|
Рабочая зона, мм |
541 | 726 | 901 | 901 | 1101 |
| Вариант исполнения в зависимости от окружающей среды | Обычный «Чистая комната» (-CR) |
Обычный (-2) «Чистая комната» (-CR) «Стерильный» (-HM-SC) «Водо- непроницаемый» (-WP) «Взрыво- защищенный» (-EX) |
Обычный (-2) «Чистая комната» (-CR) «Стерильный» (-HM-SC) «Водо- непроницаемый» (-WP) «Взрыво- защищенный» (-EX) |
Обычный «Чистая комната» (-CR) «Стерильный» (-HM-SC) «Водо- непроницаемый» (-WP) «Взрыво- защищенный» (-EX) |
Обычный (-2) «Чистая комната» (-CR) «Стерильный» (-HM-SC) «Водо- непроницаемый» (-WP) «Взрыво- защищенный» (-EX) |
|
Способы монтажа |
Потолок Пол Стена |
Потолок Пол Стена Угол |
Потолок Пол Стена Угол |
Потолок Пол Стена Угол |
Потолок Пол Стена Угол |
Небольшая нагрузка (5-20 кг)
 Источник: kuka.com
Источник: kuka.com
Семейство продуктов KR CYBERTECH оптимизировано для прецизионного применения в условиях непрерывного производства, таких как дуговая сварка, нанесение клеев и герметиков. Даже на максимальной скорости работы точность позиционирования составляет 0,04 мм. Отличительная особенность серии CYBERTECH — возможность работы инструмента значительно ниже уровня установки робота.
| KR CYBERTECH ARC nano | KR CYBERTECH nano | |||||
| KR 6 R1820 arc HW | KR 8 R1420 arc HW | KR 8 R1620 arc HW | KR 6 R1820 | KR 8 R1620 | KR 10 R1420 | |
| Полезная нагрузка, кг | 6 | 8 | 8 | 6 | 8 | 10 |
|
Рабочая зона, мм |
1823 | 1421 | 1621 | 1820 | 1620 | 1420 |
|
Вариант исполнения в зависимости от окружающей среды |
Обычный | Обычный | Обычный | Обычный Защищенный (-HP) |
Обычный Защищенный (-HP) |
Обычный Защищенный (-HP) |
| Способы монтажа | Потолок Пол Стена Угол |
Потолок Пол Стена Угол |
Потолок Пол Стена Угол |
Потолок Пол Стена Угол |
Потолок Пол Стена Угол |
Потолок Пол Стена Угол |
 Источник: kuka.com
Источник: kuka.com
| KR CYBERTECH ARC | KR CYBERTECH | |||||||
| KR 8 R2100-2 arc HW | KR 8 R2010-2 | KR 12 R1810-2 | KR 16 R1610-2 | KR 16 R2010-2 | KR 20 R1810 | KR 20 R2010 KS-F | KR 22 R1610-2 | |
| Полезная нагрузка, кг | 8 | 8 | 12 | 16 | 16 | 20 | 20 | 22 |
| Рабочая зона, мм | 2101 | 2013 | 1813 | 1612 | 2013 | 1813 | 2010 | 1612 |
| Вариант исполнения в зависимости от окружающей среды | Защищенный | Обыч. | Обыч. | Обыч. | Обыч. | Обычный «Чистая комната» (-CR) «Пищевой» (-HO) «Литейный цех» (-F) |
«Литейный цех» | Обыч. |
| Способы монтажа | Потолок Пол Стена Угол |
Потолок Пол Стена Угол |
Потолок Пол Стена Угол |
Потолок Пол Стена Угол |
Потолок Пол Стена Угол |
Потолок Пол Стена Угол |
Пол | Потолок Пол Стена Угол |
Средняя нагрузка (30-60 кг)
 Источник: kuka.com
Источник: kuka.com
Серия роботов для работы в экстремальных условиях литейного производства, малярных, сварочных и погрузочно-разгрузочных работ. Специальная конструкция обеспечивает изоляцию узлов от агрессивной внешней среды и большой межрегламентный период.
|
|
KR 30 | KR 60 |
| Полезная нагрузка, кг | 16 (-L16-2-) 30 (-HA-, -3-, -4-) |
16 (-L16-2-) 30 (-L30-) 45 (-L45-) 60 (-HA-, -3-, -4-) |
| Рабочая зона, мм | 3102 (-L16-2-) 2033 (-HA-, -3-) 2233 (-4-) |
2952 (-L16-2-) 2429 (-L30-) 2230 (-L45-) 2033 (-HA-, -3-) 2628 (L30-4-) |
|
Вариант исполнения в зависимости от окружающей среды |
Обычный «Литейный цех» |
Обычный «Литейный цех» |
| Способы монтажа | Потолок Пол |
Потолок Пол |
Высокая нагрузка (80-300 кг)
 Источник: kuka.com
Источник: kuka.com
Серия KR QUANTEC была разработана на основе многолетнего опыта KUKA в области автоматизации. Результат: надежное, универсальное и эффективное решение для любой производственной среды. Модульная система обеспечивает гибкую комплектацию роботов, а хорошая доступность узлов и агрегатов сокращает время обслуживания. Роботы серии QUANTEC могут быть оптимизированы для большей скорости или для большей точности выполнения работ. Короткие тормозные пути роботов облегчают разработку компактных роботизированных ячеек.
| KR 120 | KR 150 | KR 180 | KR 210 | KR 240 | KR 250 | KR 300 | |
|
Полезная нагрузка, кг |
120 | 150 | 180 | 210 | 240 | 250 | 300 |
| Макс. радиус действия, мм |
2701 (R2700-2) 3100 (R3100-2) |
2701 (R2700-2) 2900 (R2900-2) 3100 (R3100-2) |
2900 (R2900-2) |
2701 (R2700-2) 3100 (R3100-2) |
2900 (R2900-2) |
2701 (R2700-2) |
2701 (R2700-2) |
|
Вариант исполнения в зависимости от окружающей среды |
Стандарт | Стандарт | Стандарт | Стандарт | Стандарт | Стандарт | Стандарт |
|
Способы монтажа |
Пол | Пол | Пол | Пол | Пол | Пол | Пол |
Сверхмощные роботы (300-1300 кг)
 Источник: kuka.com
Источник: kuka.com
Сверхмощные шестиосевые роботы с открытой кинематической системой и беспрецедентной грузоподъемностью точно и быстро справляются с обработкой тяжелых грузов на расстояниях до 6,5 метров. Камни, стекло, стальные балки, компоненты для судов и самолетов, мраморные блоки, сборные железобетонные детали — все эти тяжелые нагрузки не представляют проблемы для сверхмощных роботов KUKA. Для особых областей применения существует вариант Foundry с наилучшим соотношением рабочей зоны / полезной нагрузки, или версия робота для укладки тяжелых грузов до 1,3 тонн.
| KR 360 FORTEC | KR 500 FORTEC | KR 600 FORTEC | KR 1000 titan | |
| Полезная нагрузка, кг | 240-360 | 340-500 | 420-600 |
750(L750) 950(L950) 1000(1000) 1300(1300) |
| Рабочая зона, мм | 2826-3326 | 2485-3326 | 2826-3326 |
3601(L750, L950) 3202(1000, 1300) |
|
Вариант исполнения в зависимости от окружающей среды |
Обычный «Литейный цех» |
Обычный «Литейный цех» |
Обычный «Литейный цех» |
Обычный «Литейный цех» |
| Способы монтажа |
Потолок Пол |
Потолок Пол |
Потолок Пол |
Потолок Пол |
Специальные модели
 Источник: kuka.com
Источник: kuka.com
PA – серия роботов для укладки груза на поддоны — паллетайзеры. Паллетайзеры этой серии быстро и точно выкладывают тяжелые грузы с оптимальным временем цикла. Невосприимчивы к пыли и воде, все системы электроснабжения находятся внутри корпуса.
| KR 40 PA | KR 300-2 PA | KR 470-2 PA | KR 700 PA | |
|
Полезная нагрузка, кг |
40 | 300 | 470 | 700 |
|
Рабочая зона, мм |
2091 | 3150 | 3150 | 3320 |
|
Вариант исполнения в зависимости от окружающей среды |
Обычный | Обычный | Обычный | Обычный |
|
Способы монтажа |
Пол | Пол | Пол | Пол |
Коллаборативная робототехника
 Источник: makerbot.com
Источник: makerbot.com
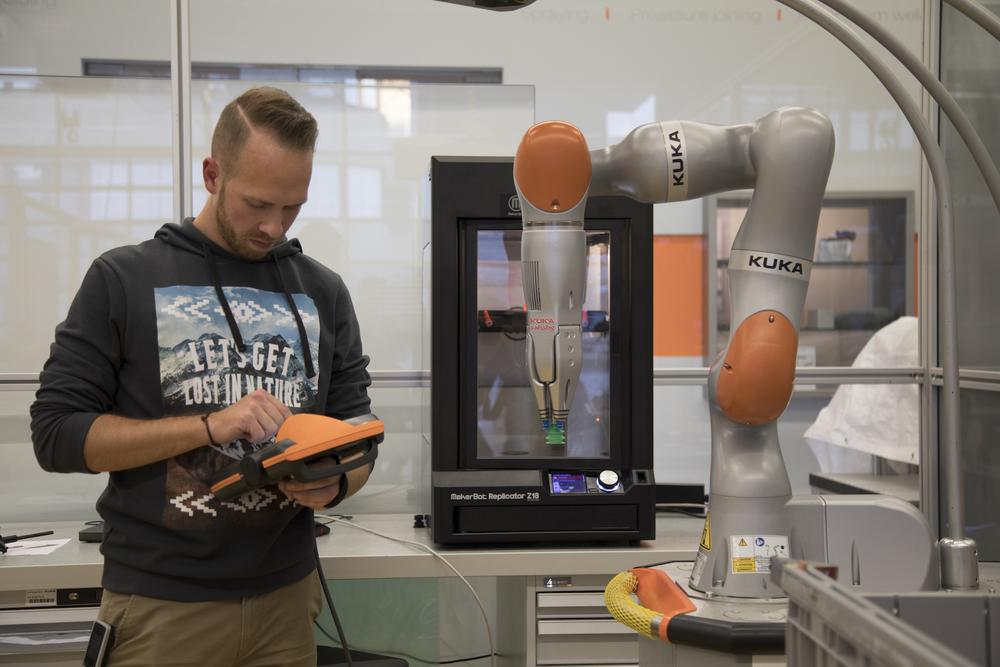
LBR iiwa – первый серийно выпущенный чувствительный коллаборативный робот, который может работать совместно с человеком. LBR — сокращение от немецкого «Leichtbauroboter» (робот легкой конструкции), iiwa – от английского «intelligent industrial workassistant» (умный промышленный ассистент). Коллаборативный чувствительный LBR iiwa имеет два исполнения, грузоподъемностью 7 и 14 кг. Двигатели роборуки KUKA способны мгновенно реагировать на препятствие своему движению и останавливаться. Благодаря тому же принципу обратной связи коллаборативные роботы способны запоминать те действия, которым их обучает оператор путем перемещения манипулятора вручную.
| LBR iiwa 7 R800 | LBR iiwa 7 R800 CR | LBR iiwa 14 R820 | LBR iiwa 14 R820 CR | |
|
Полезная нагрузка, кг |
7 | 7 | 14 | 14 |
|
Макс. радиус действия, мм |
800 | 800 | 820 | 820 |
|
Вариант исполнения в зависимости от окружающей среды |
Стандартный | «Чистая комната» | Стандартный | «Чистая комната» |
|
Способы монтажа |
Пол Потолок Стена |
Пол |
Пол Потолок Стена |
Пол |
Мобильные платформы
OmniMove
 Источник: kuka.com
Источник: kuka.com
KUKA OmniMove — транспортная платформа для тяжелых грузов. Несмотря на свои огромные размеры и грузоподъемность, он перемещается быстро и безопасно, а его радиус действия можно расширить с помощью автономного источника питания. OmniMove управляется вручную или автоматически по радиоканалу, точность позиционирования составляет +/- 3 мм.
Специально разработанные колеса позволяют мобильной сверхпрочной платформе двигаться в любом направлении и даже вращаться на месте. Сложная навигационная система KUKA Navigation Solution обеспечивает автономное маневрирование без риска столкновения и не требует специально сделанной разметки пола. Модульная конструкция позволяет KUKA OmniMove свободно масштабироваться по длине или ширине. Платформа имеет грузоподъемность до 90 тонн и, в максимальной версии, достигает длины до 30 метров.
TripleLift
 Источник: kuka.com
Источник: kuka.com
KUKA Triple Lift — это мобильная подъемная платформа для работы на высоте до восьми метров. Высота подъема плавно регулируется с помощью гидравлических телескопических цилиндров. Подъем до максимальной высоты происходит за 120 секунд. Даже в полностью поднятом положении платформа остается очень стабильной.
Технология всенаправленного колеса Mecanum позволяет KUKA Triple Lift перемещаться линейно и вращаться на одном месте. Специальные колеса Mecanum изготовлены из отдельных бочкообразных роликов, что позволяет каждому из них двигаться самостоятельно, независимо от других колес. Даже при максимальной загрузке в 1000 кг платформа способна перемещаться с точностью +/- 5 мм.
Дополнительные бамперы с контактными полосами обеспечивают безопасную остановку платформы в случае столкновения. Двухканальный контроль скорости обеспечивает дополнительную безопасность. Управление платформой осуществляется по радиоканалу.
Линейные кинематические системы
 Источник: kuka.com
Источник: kuka.com
Линейные кинематические системы позволяют использовать широкие рабочие области благодаря большому радиусу действия осей. Например, ось 1 может достигать 45 000 миллиметров. Радиус действия оси 2 варьируется от 500 до 2 000 миллиметров, в то время как ось 3 имеет радиус действия до 3 000 миллиметров. Рабочее пространство возле робота может использоваться полностью, за исключением области для монтажа колонны. Линейные кинематические системы доступны с грузоподъемностью от 16 до 600 кг на три оси. Также есть возможность увеличить предельные нагрузки для осей. В зависимости от размера робота, продольная ось может нести максимально до 1100 кг, а поперечная – до 375 кг.
| Модель | Полезная нагрузка, кг | Количество осей | Повторяемость | Вес*, кг |
| RL16 | 16 | 3 | ± 0,1 мм | 305 |
| RL50 | 50 | 3 | ± 0,1 мм | 650 |
| RL80 | 80 | 3 | ± 0,1 мм | 1200 |
| RL130 | 130 | 3 | ± 0,2 мм | 2450 |
| RL300 | 300 | 3 | ± 0,3 мм | 2450 |
| RL600 | 600 | 3 | ± 0,3 мм | 2500 |
* Указан собственный вес робота без дополнительного инструмента.
Портал лазерной резки
 Источник: kuka.com
Источник: kuka.com
Портал KUKA KR70 LP для лазерной резки второго поколения — динамичное сочетание легкого дизайна, гибкого управления и роботизированной технологии. KR70 LP был специально оптимизирован для лазерной резки сложных деталей. Модульная структура KR70 LP позволяет использовать рабочие пространства объемом до 90 м³.
Благодаря интеграции широкого спектра производственных лазеров и новейших оптических систем, KUKA обеспечивает максимальное качество резки и минимальные потери материала. Использование самых современных шаговых двигателей и надежных редукторов дает клиенту максимальную производительность, точность и отличные динамические характеристики. Контроллер KR C минимизирует затраты на интеграцию в производственные линии, а также на профилактическое и сервисное обслуживание.
Периферийные устройства
 Источник: kuka.com
Источник: kuka.com
Периферия робота – один из ключевых факторов влияющих на эффективность производственных процессов. С помощью конечных эффекторов, систем энергоснабжения, линейных блоков и позиционеров можно значительно расширить функциональные возможности роботов. Дополнительные модули для всех категорий полезной нагрузки и всех типов обрабатываемых деталей, а также для совместной работы человека и робота, позволяют гибко и легко модернизировать производственные линии.
Системы энергоснабжения
 Источник: kuka.com
Источник: kuka.com
Разнообразие роботов KUKA огромно. Но системы энергоснабжения KUKA спроектированы таким образом, что все модели одного семейства роботов могут быть оснащены унифицированным комплектом энергоснабжения. Это облегчает планирование энергосистем предприятия, снижает затраты на настройку и увеличивает безопасность обслуживания.
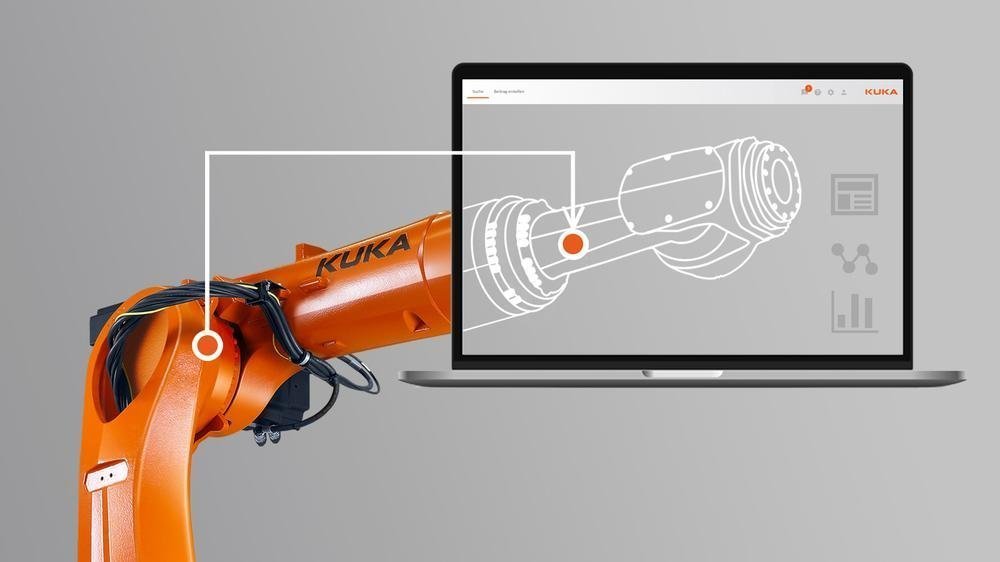
Машинное зрение KUKA 3D
 Источник: kuka.com
Источник: kuka.com
Система стереокамер обеспечивает трехмерное восприятие объекта в реальном времени и позволяет проводить как трехмерные измерения, так и позиционирование рабочего инструмента в пространстве. Теперь роботы KUKA могут определять свое положение и ориентацию в пространстве с точностью до миллиметра, в том числе и при плохой освещенности. За счет обработки изображения непосредственно в датчике, KUKA 3D Perception генерирует точное изображение даже при быстрых движениях. Использование нескольких датчиков позволяет увеличить точность позиционирования.
Линейные блоки
 Источник: kuka.com
Источник: kuka.com
С линейными блоками KUKA вы добавляете роботу дополнительную степень свободы, тем самым значительно расширяя его рабочую зону. Линейные блоки управляются тем же контроллером, что и сам робот, и могут быть легко интегрированы в производственный процесс. На одном линейном устройстве может работать до четырех роботов. Линейные блоки KUKA доступны в различных размерах и категориях полезной нагрузки, в зависимости от серии установленных на них роботов. Модели блоков KL 100, KL 250, KL 1000, KL 3000, KL 4000 имеют нагрузочную способность в 100, 250, 1000, 3000 и 4000 килограмм соответственно.
Позиционеры и эффекторы
 Источник: kuka.com
Источник: kuka.com
KUKA предлагает широкий ассортимент позиционеров для обработки деталей массой от 250 до 12 000 кг. Всегда можно найти позиционер для любой производственной задачи — например, для дуговой сварки, точечной сварки или металлообработки. В продуктовой линейке KUKA есть следующие типы позиционеров:
-
KP1-H одноосевой позиционер
-
KP1-HC одноосевой позиционер с противовесом
-
KP1-MB одноосевой модульный поворотный стол
-
KP1-MC одноосевая модульная противовесная
-
KP1-MD одноосевой модульный привод
-
Одноосевой модульный привод KP1-MDC
-
KP1-V одноосевой позиционер
-
KP2-HV HW двухосевой позиционер
-
KP2-HV двухосевой позиционер
-
KP2-SV HW двухосевой позиционер
-
KP3-H2H трехосевой позиционер
-
KP3-V2H трехосевой позиционер
-
KP3-V2MD трехосевой позиционер
-
DKP двухосевой позиционер
-
Индивидуальные позиционеры.
Программирование роботов KUKA
 Источник: kuka.com
Источник: kuka.com
Роботы KUKA можно программировать напрямую, с использованием языка KRL, через smartPAD, или с использованием разных методов, как и рекомендует производитель. Всего в портфеле KUKA более 40 программных продуктов, позволяющих инженерам и пользователям решать абсолютно любые задачи. Рассмотрим три из них.
KUKA.OfficeLite
 Источник: kuka.com
Источник: kuka.com
Виртуальный контроллер роботов KUKA. Систему программирования можно использовать для создания и оптимизации программ в автономном режиме на любом ПК. Готовые программы можно перенести прямо в контроллер робота и начать немедленную работу. KUKA.OfficeLite идентичен системному программному обеспечению KUKA для KR C4. Программное обеспечение использует оригинальный синтаксис KUKA SmartHMI и KRL, поэтому программирование учитывает все особенности роботов KUKA. KUKA.OfficeLite поставляется как виртуальный образ vmware®.
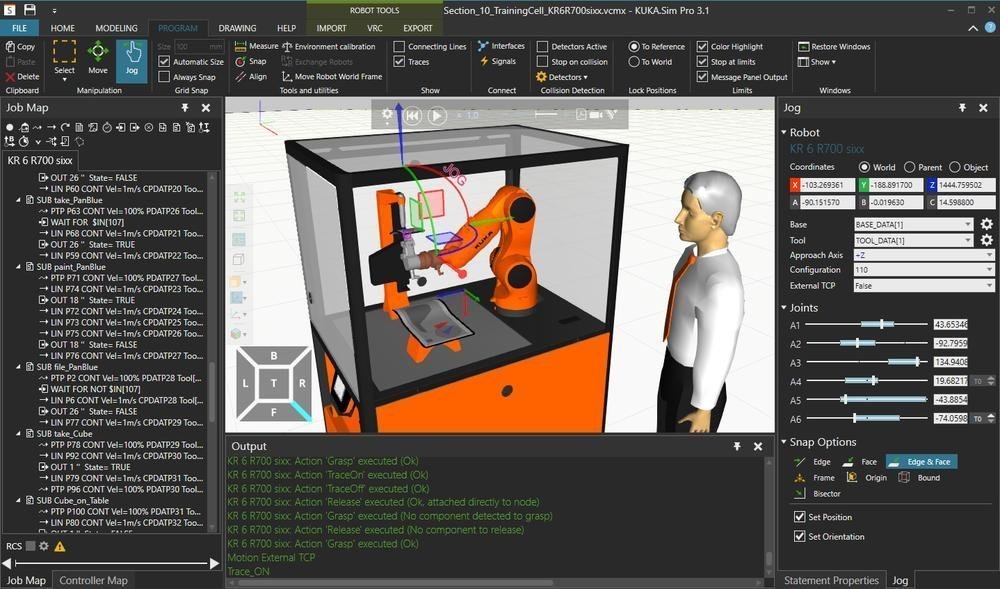
KUKA.Sim
 Источник: roboticsbook.com
Источник: roboticsbook.com
Программное обеспечение для моделирования комплексов робототехники KUKA. Можно просто перетащить компоненты производственной линии из библиотеки и поместить их в нужное место, чтобы изучить альтернативы и проверить концепции организации производства с минимальными усилиями.
Возможности текущей версии KUKA.Sim Pro 3.1:
-
64-битное приложение для повышения производительности
-
Интегрированный импорт САПР (CATIA V5, V6, JT, STEP, RealDWG и т.п.)
-
Обширная онлайн-библиотека с доступными на данный момент моделями роботов и т.д.
-
Конфигурируемая проверка столкновений и проверка расстояния
-
Функция экспорта 2D-чертежей (RealDWG)
-
AVI HD видео и функция экспорта 3D PDF
-
Поддержка 3D-мыши (например, 3Dconnexion)
-
Интерфейс OPC UA, позволяющий подключаться к PLC для Beckhoff TwinCAT, CodeSys, Siemens PLCSIM Advanced (Tia Portal)
-
Страница моделирования для создания собственных компонентов
-
Поддержка приложения Mobile Viewer
-
Поддержка виртуальной реальности (требуется дополнительное оборудование VR)
-
Определение времени цикла (даже без KUKA.OfficeLite).
KUKA HRC Guide
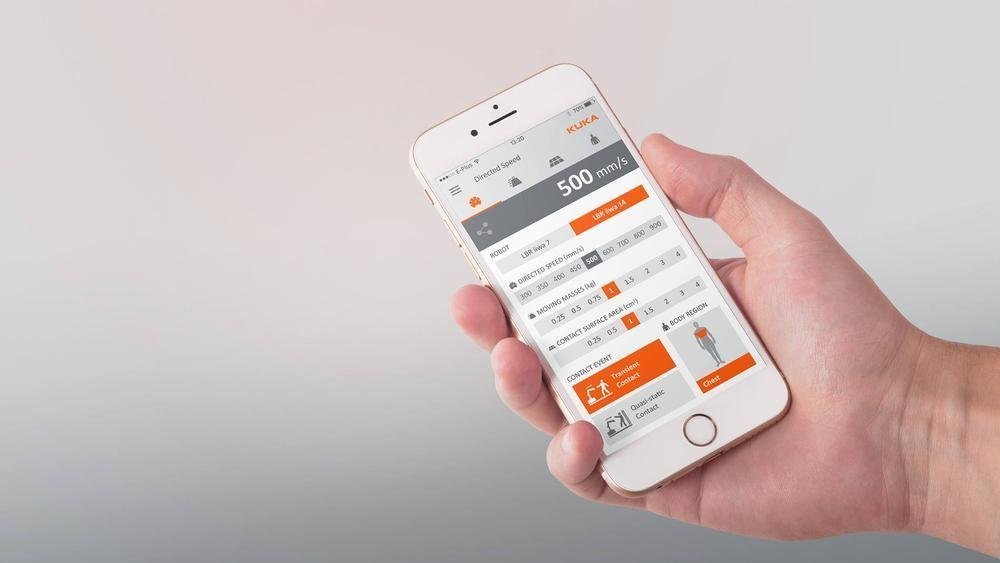 Источник: kuka.com
Источник: kuka.com
HRC Guide App — это инструмент для совместной работы с роботами для всех, кто разрабатывает или запускает приложения для Human Robot Collaboration (HRC). Он обеспечивает быстрый обзор наиболее важных параметров касающихся настройки HRC. Основные функции – расчет максимальной скорости робота, максимальной массы полезной нагрузки и возможного взаимодействия коллаборативного робота с оператором.
Кейсы применения роботов KUKA
Подача труб в лазерный резак, Sedus Stoll AG
 Источник:kuka.com
Источник:kuka.com
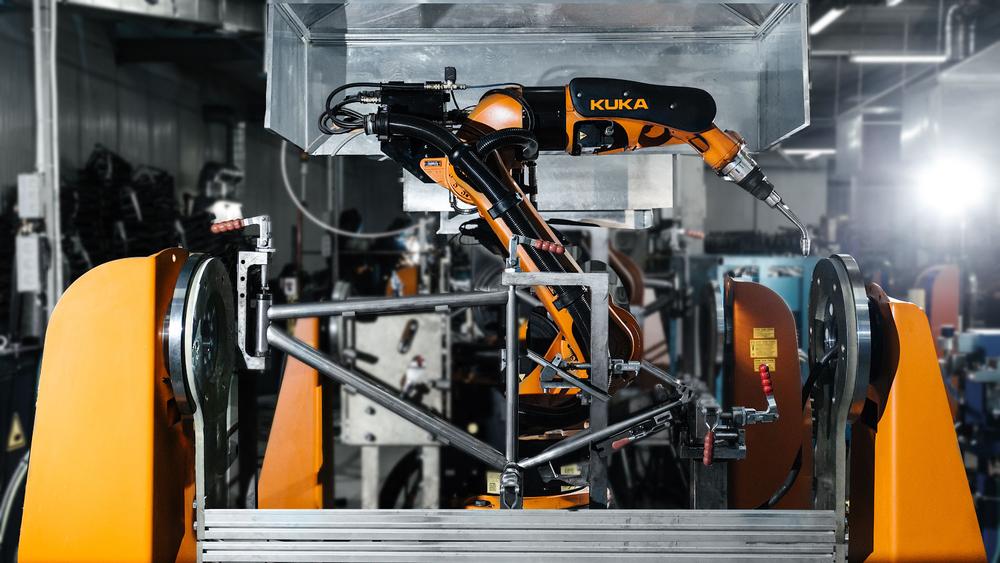
Sedus Stoll AG производит высококачественную офисную мебель с 1871 года. В целях автоматизации производственного процесса, компания Trafö Förderanlagen GmbH & Co. KG разработала систему выбора, захвата и загрузки металлических труб в лазерный резак. Робот KUKA KR QUANTEC KR270 R2700 ultra полностью автоматически распознает трубу нужного диаметра и сечения, поднимает её нужным типом захвата, вне зависимости от положения на складе, и загружает в лазерный резак.
 Источник:kuka.com
Источник:kuka.com
«Ручная загрузка больше не нужна. Роботизированная ячейка значительно облегчает работу и ускоряет производственный цикл. Лазерная система теперь может использоваться круглосуточно и без выходных», — говорит Ульрих Некерманн, менеджер по продажам DACH в Trafö Förderanlagen GmbH & Co. KG.
Нанесение защитных покрытий на кузов авто, концерн Daimler
 Источник: kuka.com
Источник: kuka.com
Ранее нанесение клея и герметиков на кузов автомобиля в Daimler был ручным процессом, выполняемым в три смены. Теперь защитой от коррозии занимается комбинация коллаборативного легкого робота KUKA LBR iiwa с шестиосевым роботом KR 60. Взаимодействие этих двух роботизированных систем позволяет достать те швы на кузове транспортного средства, которые ранее мог обработать только человек.
 Источник: kuka.com
Источник: kuka.com
«Мы разработали решение для герметизации шва, которое объединяет преимущества обоих роботов. Таким образом, мы получили высокоточное устройство с максимальной доступностью и большой рабочей зоной», — говорит Герхард Хартманн, руководитель отдела управления проектами и инжиниринга в области технологий склеивания в KUKA.
Транспортировка алюминиевых пластин, AMAG Austria Metall AG
 Источник: kuka.com
Источник: kuka.com
AMAG является крупнейшим в Австрии производителем алюминия и ведущим поставщиком алюминиевого сырья и проката. Для внутренней логистики на новом заводе была установлена автономная система транспортировки товаров, созданная на базе самоходной всенаправленной платформы KUKA OmniMove. Всенаправленные колеса, основанные на технологии Mecanum, обеспечивают движение во всех направлениях и вращение на месте, значительно увеличивая мобильность сырья внутри предприятия. OmniMove работает с точностью +/- 5 миллиметров.
 Источник: kuka.com
Источник: kuka.com
AMAG очень доволен – автоматизация системы внутренней логистики принесла много преимуществ для компании. По сравнению с использованием крана или автопогрузчика, с помощью робота OmniMove задача выполняется быстрее и безопаснее. Использование транспортных рам также значительно снизило требования к упаковке. При работе в три смены, другие цеха круглосуточно снабжаются алюминиевыми пластинами всего двумя роботизированными тяжеловозами.
Как выбрать робота
 Источник: kuka.com
Источник: kuka.com
Сложность выбора часто заключается не в том, чтобы узнать, нужен ли робот вообще, а в том, какие из имеющихся задач лучше всего подходят для улучшения производительности данного производства с помощью роботизации. Инновационный подход KUKA заключается в том, чтобы не искать задачу для роботов, а разделить производственный цикл на задачи, под которые уже адаптировать роботов.
По данным Международной федерации робототехники, продажи роботов выросли более чем на 6% за последний год и аналитики ожидают не менее 12% роста рынка до 2022 года. Все больше и больше компаний во всех отраслях ищут робототехнические решения для увеличения эффективности производственных мощностей, снижения затрат и повышения безопасности работников.
Современные промышленные роботы стали умнее и быстрее, они легко адаптируются к различным типам задач и работают совместно с человеком. Обладая передовыми возможностями машинного зрения и сенсорами, роботы могут выполнять такие сложные задачи, которые были невозможны для них даже несколько лет назад.
 Источник: kuka.com
Источник: kuka.com
Производители роботов рекомендуют работать с системными интеграторами, которые могут использовать знания о продукте и опыт прошлых проектов. Интеграторы помогут создать как производственный комплекс целиком, так и выбрать отдельного робота необходимого для выполнения задачи, и предложить для него наиболее эффективную периферию. В любом случае, инженерам предприятия придется провести некоторую подготовительную работу.
Взгляните на все сферы производства, как на цели для роботизации. Некоторые области все еще могут показаться слишком сложными и нереалистичными, но с помощью новейших технологий многое стало возможно.
Исторически роботы выполняли повторяемые задачи и были отгорожены от людей. Сегодня роботы могут безопасно работать рука об руку с людьми, в совместной рабочей среде. Роботы, постоянно обрабатывая информацию об окружающем пространстве, повышают безопасность рабочих и обеспечивают открытую, адаптивную, легко настраиваемую производственную коллаборацию.
Лучшей областью для применения робототехники являются производственные условия представляющие опасность для работников. Например, роботы могут переносить тепловую и агрессивную химическую среду гораздо лучше, чем люди. Правильно спроектированная рабочая зона минимизирует воздействие опасных факторов и повышает безопасность работников.
 Источник: pinterest.ru
Источник: pinterest.ru
При выборе типа промышленного робота следует учитывать пять критериев:
-
Грузоподъемность промышленного робота должна быть больше, чем общая масса полезной нагрузки, включая вес дополнительных частей на конце манипулятора (например, конечного эффектора).
-
Рабочее пространство робота включает в себя не только расстояние между роботом и продуктами, но также пространство для движения его механизмов. Исходя из этого необходимо определить, какое место доступно на производственной линии для установки робота. Это особенно важно при внедрении роботов в существующих крупных цехах.
-
Скорость промышленных роботов имеет огромное значение. При проектировании линии, спрогнозируйте потенциальное увеличение всей производственной линии и увеличьте пропускную способность средств доставки и перемещения деталей, чтобы производственная логистика не стала узким местом.
-
Точность и повторяемость должны обеспечивать долговременную эксплуатацию без частых настроек. Тем не менее, время от времени роботы будут нуждаться в юстировке и технологическом обслуживании. Необходимо учесть это, чтобы избежать простоя цеха из-за вывода из эксплуатации какого-либо устройства.
Заключение
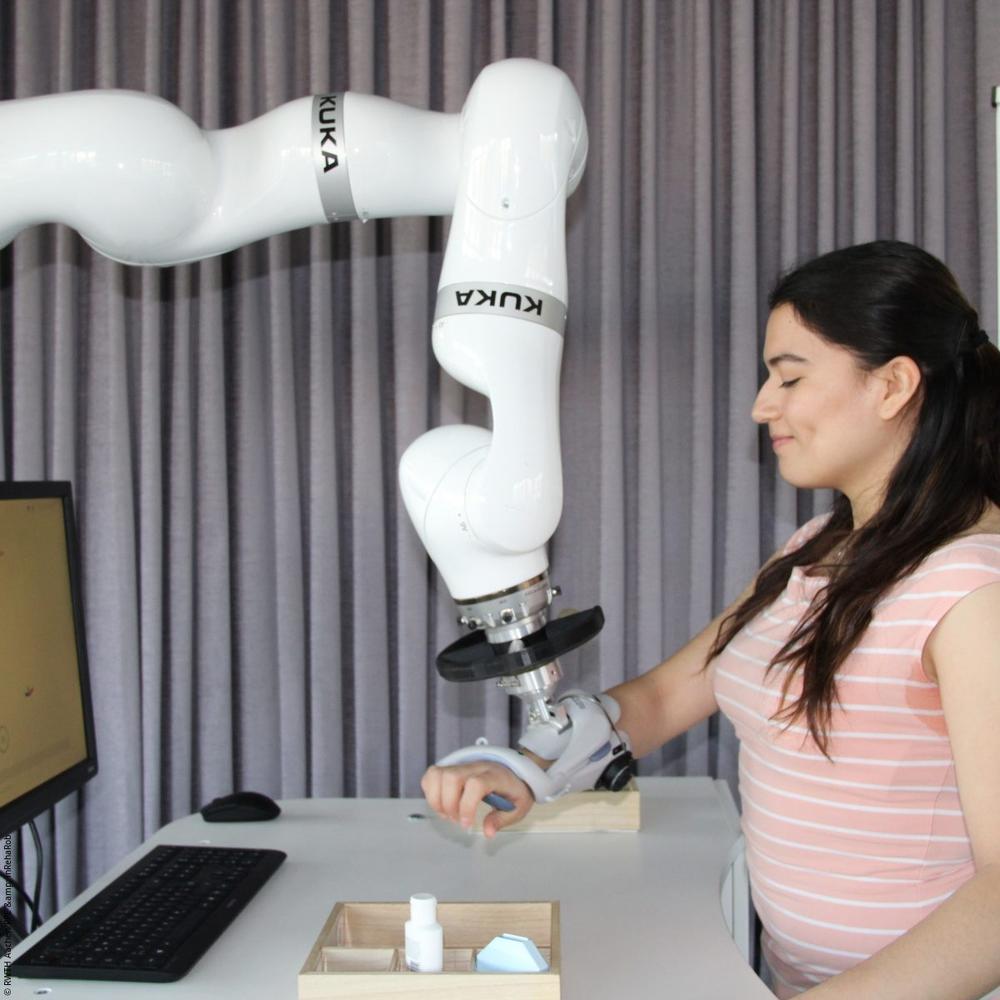 Источник: medica-tradefair.com
Источник: medica-tradefair.com
Современное производство невозможно представить без систем автоматизации вообще и роботов в частности. Они способствуют повышению производительности и уменьшению накладных расходов, делая продукцию доступнее и качественнее.
Для повышения эффективности производства обращайтесь в Top3DShop — мы выполним полный цикл работ по автоматизации и роботизации, начиная с оценки применимости робототехнических устройств на существующих линиях или проектирования линий «с нуля», и заканчивая всем комплексом пусконаладочных работ и техобслуживания.
Подписывайтесь на наш телеграм-канал с отборными кейсами Роботизации и Автоматизации со всех уголков мира:
Рекомендуемые товары










Оставить комментарий