

Роботизированная рука: обзор, плюсы и минусы, применение
В этом обзоре вы прочитаете о роборуках различных типов — по области применения, по внутреннему устройству и принципу работы, по характеристикам; узнаете о том, какую пользу они приносят и что могут; прочитаете о примерах применения.
Содержание
- Что такое роботизированная рука
- Классификация роботизированных рук
- Захватные устройства и инструменты для роботизированных рук
- Как выбрать роботизированную руку
- Кейсы применения
- Рекомендуемое оборудование
- Какие преимущества дает вам использование промышленных роботов
- Как оборудовать производство
Что такое роботизированная рука
 Источник: cncrobotics.co.uk
Источник: cncrobotics.co.uk
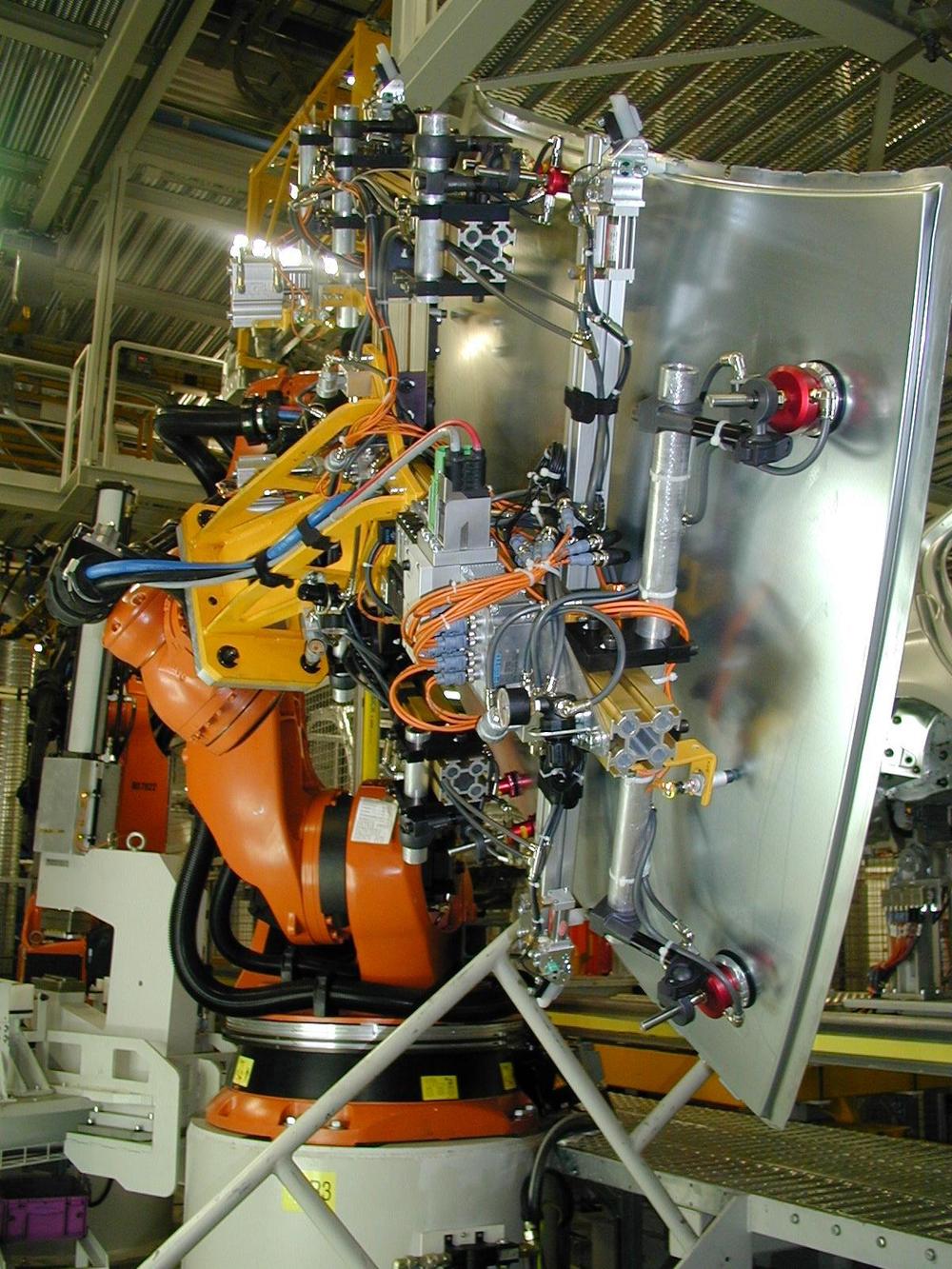
Роботизированная рука — это тип механической руки, обычно программируемой, с функциями, аналогичными человеческой руке. Рука может быть как самостоятельным механизмом, так и частью более сложного робота. Сегменты манипулятора имеют соединения, позволяющие совершать вращательные или поступательные движения. Роботизированная рука заканчивается либо захватным механизмом, либо каким-то рабочим инструментом.
Классификация роботизированных рук
По принципиальному устройству
 Источник: kuka.com
Источник: kuka.com
Картезианские (декартовы, линейные) манипуляторы – самые простые из всех стационарных роботов. Типичные декартовы роботы имеют 3 линейные оси свободы, которые перпендикулярно ориентированы друг к другу, что обеспечивает рабочую область в форме прямоугольной коробки. Из-за их относительной простоты, по сравнению с другими типами роботов, декартовы роботы дешевле, чем их аналоги. Из-за своей жесткой конструкции этот тип роботов имеет хороший уровень точности и повторяемости. Например, трехосевой декартовый робот KUKA RL16 имеет повторяемость +/- 0,1 мм.
SCARA-манипуляторы обычно имеют несколько параллельно соединенных рычагов, главным образом цилиндрической конструкции, которые обеспечивают позиционирование в одной выбранной плоскости. Из-за возможной деформации при полном вылете рычага, как правило, не обладают высокой грузоподъемностью, но могут похвастать хорошей скоростью и точностью. Традиционно используются в сборочных линиях.
 Источник: logismarket.es
Источник: logismarket.es
Роботизированные руки шарнирной конструкции имеют поворотные соединения, число которых может варьироваться от двух до 10 или более. Манипуляторы такого типа монтируются на вращающемся основании. Сегменты руки соединены поворотными шарнирами. Каждое соединение называется осью и обеспечивает дополнительную степень свободы. Промышленные роботы обычно имеют четыре или шесть осей. Несмотря на более сложную конструкцию, на сегодня это одни из самых универсальных, совершенных и распространенных роботизированных рук, имеющие грузоподъемность от нескольких килограмм до 1,3 тонны. В линейном ряде KUKA широко представлены шарнирные роботы — от высокоточного KUKA KR 3 AGILUS с пакетом ready2_fasten_micro до супертяжеловеса KR-1000 Titan.
 Источник: wevolver.com
Источник: wevolver.com
Антропоморфные роботизированные руки – разновидность шарнирных роботов, имеющих антропоморфные захваты.
 Источник: roboticsandautomationnews.com
Источник: roboticsandautomationnews.com
Коллаборативные роботизированные руки – разновидность шарнирных роботов, обладающих интеллектуальными технологиями управления и высокоточными датчиками, для облегчения взаимодействия с человеком и повышения уровня безопасности. KUKA предлагает клиентам коллаборативных роботов KUKA LBR iisy и KUKA LBR iiwa, которые могут быть быстро установлены в любом месте и для любой цели, соответствующей вашим производственным задачам.
 Источник: phys.org
Источник: phys.org
По полезной нагрузке
 Источник: kuka.com
Источник: kuka.com
Роборуки условно разделяются по полезной нагрузке — по весу объектов, которыми они могут манипулировать. Во многих применениях компактные размеры важнее грузоподъемности, потому производители предлагают широкий выбор по этому критерию:
- 0-20 кг (KUKA KR AGILUS, KR CYBERTECH, LBR);
- 20-80 кг (KUKA KR 30, KR 40, KR 60);
- 80-300 кг (KUKA KR QUANTEC, KR 360 FORTEC, KR 300);
- 300-1000 кг (KUKA KR 600 FORTEC, KR 700);
- 1000-3000 кг (KUKA KR 1000 Titan).
По области применения
 Источник: kuka.com
Источник: kuka.com
Роборуки разделяются по области применения, т.к. помимо универсальных роботизированных рук существуют узкоспециализированные, приспособленные к определенным манипуляциям:
- Автомобильная промышленность;
- Электротехника и электроника;
- Металлообработка, машиностроение;
- Химическая промышленность;
- Медицина и фармацевтика;
- Продовольствие и сельское хозяйство;
- Образование;
- Иные области.
Захватные устройства и инструменты для роботизированных рук
 Источник: goudsmitmagnets.com
Источник: goudsmitmagnets.com
Роботы-манипуляторы оснащаются различными оконечными устройствами, от простейших — пневматических или электромагнитных, удерживающих деталь вакуумом или магнитным полем, до сложных роборук с электромеханическим или гидравлическим приводом, а также всевозможных специальных инструментов — закручивающих, сварочных, режущих и т.д.
Инструменты роботов разделяются по разным принципам.
По принципу действия:
- механические;
- магнитные;
- вакуумные;
- с эластичными камерами, деформирующимися под действием нагнетаемого внутрь воздуха или жидкости.
По характеру базирования:
- центрирующие;
- базирующие;
- перебазирующие..
По характеру крепления:
- несменяемые;
- сменные;
- быстросменные;
- с автоматической сменой.
По виду управления:
- неуправляемые;
- командные;
- жестко программируемые;
- адаптивные.
По типу губок:
- жесткие;
- регулируемые;
- гибкие;
- пружинящие.
По типу привода:
- пружинные;
- пневматические;
- гидравлические;
- электромеханические.
Как выбрать роботизированную руку
 Источник: asia.nikkei.com
Источник: asia.nikkei.com
При выборе робототехники необходимо точно понимать, какие задачи будет выполнять робот. Это основной критерий при выборе типа, размера и возможностей робота, которого вы хотите купить. В зависимости от этого можно определиться с прочими критериями.
Полезная нагрузка
 Источник: sooyeerobot.com
Источник: sooyeerobot.com
Полезная нагрузка — это максимальная нагрузка, которую робот может перемещать в рабочем пространстве. Если вы хотите перенести деталь с одного станка на другой, вам необходимо включить вес детали и вес захвата робота в полезную нагрузку.
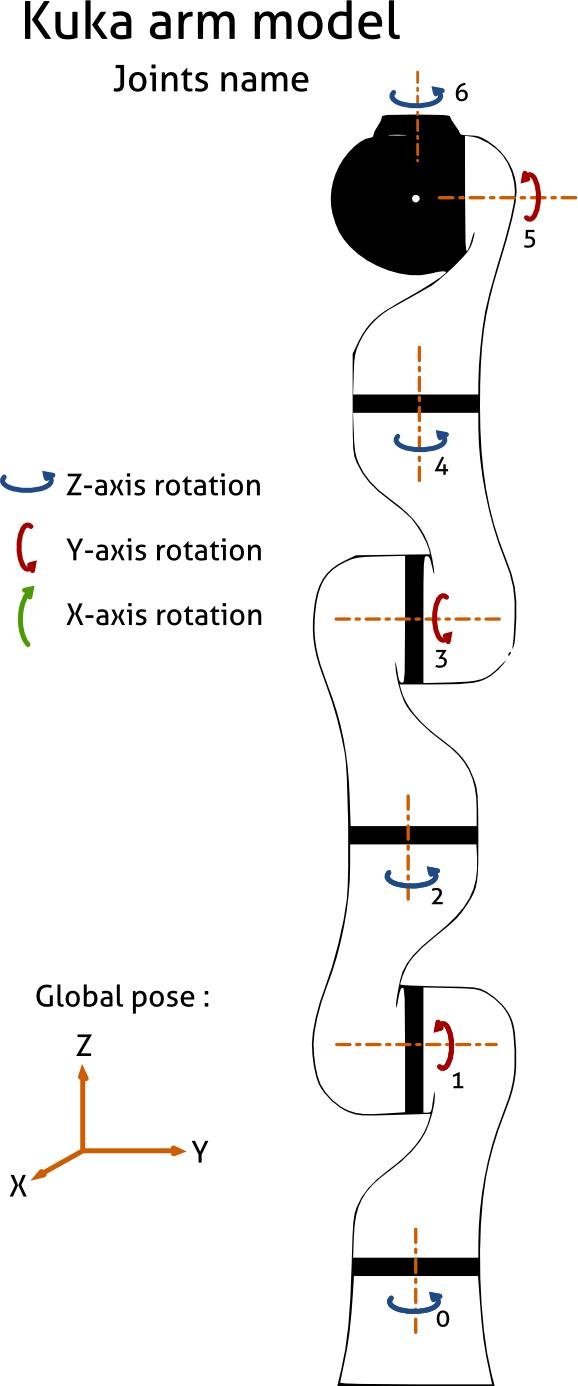
Количество осей
Количество осей у робота также называют степенями свободы. Если у вас простые задачи, такие как захват и перемещение детали с одного конвейера на другой, достаточно простого 4-осевого робота. Однако, если вашему роботу предстоит действовать в небольшом рабочем пространстве и его рука должна иметь большую подвижность, то робот с 6 или 7 осями будет лучшим вариантом. Стоит заметить, что наличие у робота большего, чем надо под конкретную задачу, количества степеней свободы — преимущество, позволяющее перепрофилировать его и использовать в большем количестве задач.
 Источник: openrobots.org
Источник: openrobots.org
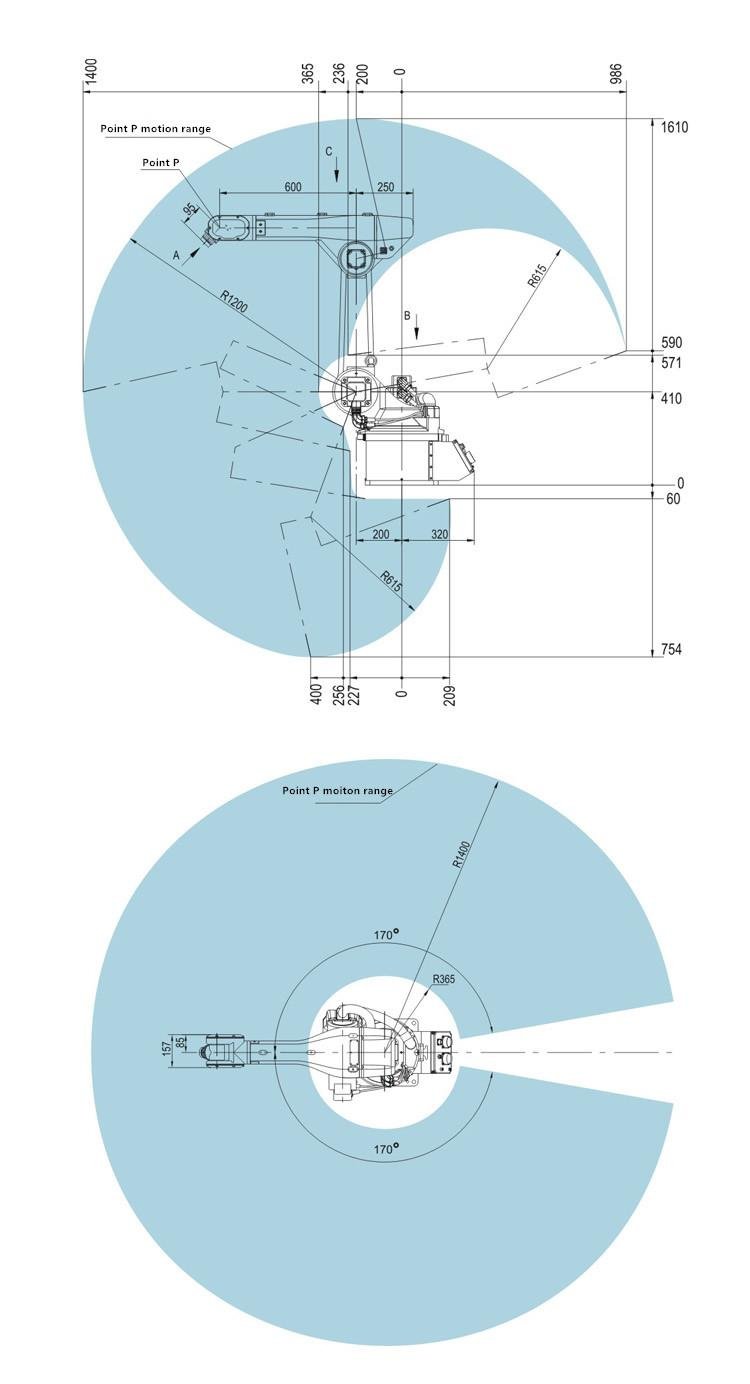
Рабочий диапазон
 Источник: sooyeerobot.com
Источник: sooyeerobot.com
При подборе обрудования необходимо учитывать — на какое максимальное расстояние должен дотягиваться робот для выполнения поставленных задач. Максимальный вертикальный вылет робота измеряется от самой низкой точки, которую робот может достичь, до максимальной высоты. Максимальный горизонтальный вылет — это расстояние от центра основания робота до самой дальней точки, которую манипулятор может достичь горизонтально. Обратите также внимание на рабочий угловой диапазон, выраженный в градусах.
Повторяемость и точность
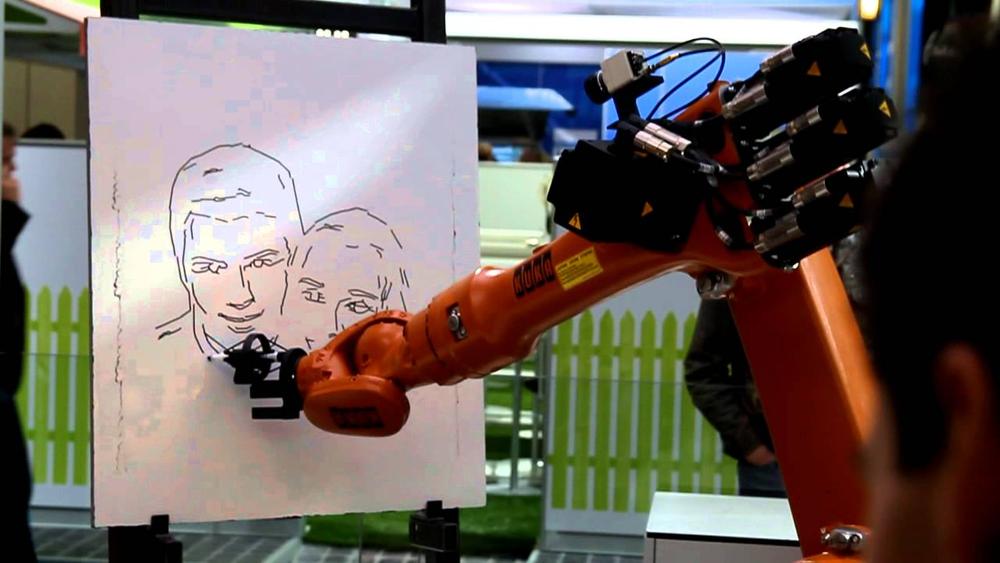 Источник: youtube.com
Источник: youtube.com
Повторяемость и точность – способность робота достигать одинакового положения каждый раз, когда он выполняет одну и ту же процедуру. Например, если ваш робот необходим для создания электронной печатной платы, вам может понадобиться робот с высокой степенью повторяемости и точности. Если ваша задача довольно грубая, такая как укладка паллет, то нет смысла переплачивать за высокую точность.
Скорость
Как такового, единого параметра «скорости» применительно к роботам не существует. В зависимости от задачи, скорость может быть линейной, угловой, выраженной в единицах повторяемых действий за период времени и тому подобных величинах.
Масса
 Источник: kuka.com
Источник: kuka.com
Масса робота является важным фактором при разработке роботизированной ячейки. Если промышленный робот должен сидеть на специальном основании или на рельсе, нужно знать его вес, чтобы спроектировать соответствующую опору. Если предполагается перемещение роботом тяжестей — надо прибавить к этой величине максимальный вес перемещаемого объекта.
Наличие тормозов
 Источник: robostav.cz
Источник: robostav.cz
В основном, каждый производитель роботов предоставляет информацию о тормозной системе своего робота. У некоторых роботов есть тормоза по всем осям, а у других нет. Чтобы иметь точное и повторяемое положение в рабочей области, вам нужно иметь достаточное количество тормозов.
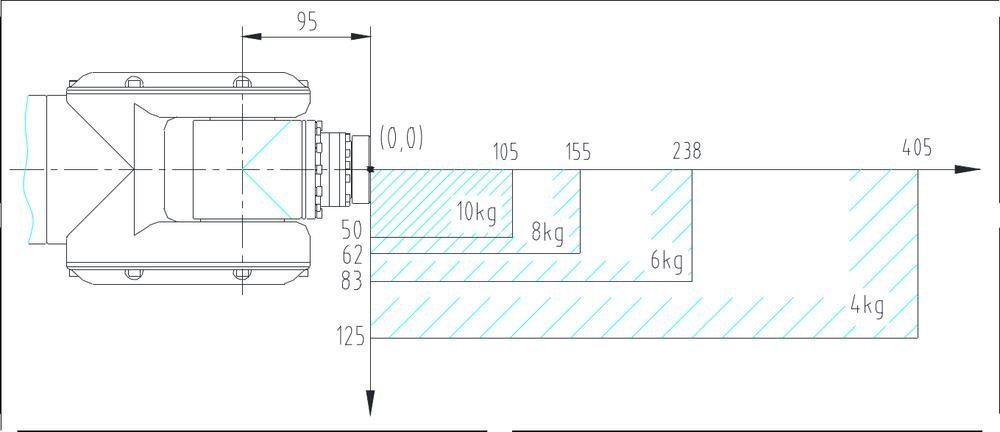
Крутящий момент и инерционность
Для высокоточных применений производителем может быть указана инерционность определенных сегментов руки. Если ваш маневр требует определенного крутящего момента для правильного выполнения задания, вам необходимо проверить, является ли максимальный крутящий момент, применимый к оси, достаточным. Если предельный крутящий момент на оси будет превышен – робот выключится из-за перегрузки.
Защита
 Источник: kuka.com
Источник: kuka.com
В зависимости от условий работы, оборудование должно отвечать определенным стандартам защиты от внешних воздействий по таким параметрам, как защищенность и безопасность. В описаниях и технической документации степень защищенности указывается кодом IP (International Protection Marking - международная защитная маркировка, стандарты защищенности корпусов от проникновения жидких и твердых веществ внутрь).
Маркировка имеет вид IP-XX, где первая X означает защиту от посторонних предметов (от частей тела человека до частиц пыли — от 1 до 6), вторая — защиту от проникновения воды при разной длительности воздействия и давлении (от 1 до 9).
Если робот работает с продуктами питания, лабораторными или медицинскими инструментами, в легко воспламеняющихся или агрессивных средах — вам потребуется устройство соответствующее специальным отраслевым стандартам.
Кейсы применения
Строительство из дерева, BEC и ICD
 Источник: kuka.com
Источник: kuka.com
Одним из направлений деятельности Института цифрового проектирования и строительства в Университете Штутгарта является роботизированное производство в архитектуре. В сотрудничестве с BEC GmbH, ICD разработал инновационный легкий деревянный павильон, который может быть построен только с помощью роботов.
 Источник: kuka.com
Источник: kuka.com
При сборке конструкции использовались: двухосный позиционер KUKA DKP-400 и два робота KUKA KR 500 FORTEC. Процесс сборки был следующим:
- Робот 1 устанавливает основание на двухосный позиционер KUKA DKP-400;
- Робот 2 наносит клей на деревянную панель;
- Робот 1 прикрепляет к ней несущую балку;
- Робот 2 прибивает балку на место деревянными гвоздями;
- Робот 1 приклеивает дополнительную панель к клею, нанесенному на балку роботом 2;
- Панель крышки также фиксируется гвоздями;
- Как только клей застынет, робот снова помещает собранную конструкцию на DKP-400;
- Робот 2 точно фрезерует угловые контуры и соединения;
- Робот 1 монтирует полученную часть конструкции.
 Источник: kuka.com
Источник: kuka.com
«Эта легкая конструкция не имеет аналогов в мире. Без роботизированного производства её создание было бы невозможно», — говорит Ханс Якоб Вагнер, научный сотрудник ICD.
«Робот склеивает деревянные панели быстро и точно. Еще одно преимущество: при фрезеровании робот делает допуск не более 0,3 мм.», — объясняет Матиас Бак, управляющий директор BEC GmbH.
Многоцелевые мобильные роботы, LMZ
 Источник: kuka.com
Источник: kuka.com
Компания Lenkering Montage und Zerspanungstechnik GmbH (LMZ) специализируется на производстве машин специального назначения, работающих по разным технологиям. В своей работе компания использует роботизированные комплексы на базе KR 6 R900 из серии KUKA AGILUS, установленные на мобильной платформе. Роботизированная рука KUKA AGILUS имеет максимальную повторяемость и высочайшую точность, обладает способностью эффективно работать в ограниченном пространстве. Во время работы, из соображений безопасности, вокруг робота устанавливается легкое защитное ограждение.
«Мобильное использование роботов в различных задачах сокращает время простоя, что приводит к очень быстрому возврату инвестиций», — объясняет Деннис Ленкеринг, управляющий директор LMZ.
 Источник: kuka.com
Источник: kuka.com
Автоматизация сборочного производства, BMW
 Источник: press.bmwgroup.com
Источник: press.bmwgroup.com
Завод BMW в Дингольфинге. В прошлом работникам приходилось самостоятельно поднимать тяжелые конические шестерни для передних мостов, но теперь они работают рука об руку со своим чувствительным коллегой, роботом KUKA LBR iiwa. Робот настолько безопасен, что позволяет использовать его в ограниченном пространстве и совершенно без защитных ограждений.
Кристиан Дункерн, руководитель департамента производства, планирования, инструментальной и заводской инженерии в BMW Group:
«Новые технологии открыли для BMW Group возможности для дальнейшего развития производственной системы на многих уровнях. Более, чем когда-либо прежде, люди формируют свои рабочие места и могут заниматься еще более сложными процессами в автомобильном производстве».
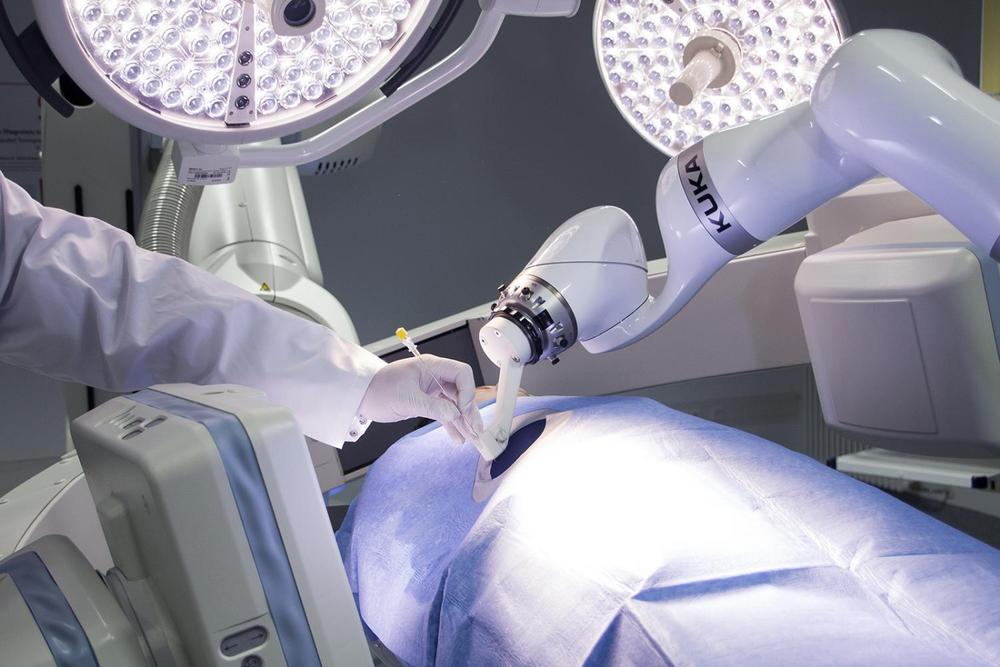
Blount Memorial Hospital, Maryville, Теннесси, “Artis zeego”
 Источник: kuka.com
Источник: kuka.com
Современная роботизированная система ангиографии «Artis Zeego» от Siemens Healthcare, созданная на базе роботизированной руки KUKA, охватывает широкий спектр методов лечения путем сложных катетерных вмешательств, проводимых в гибридной операционной.
 Источник: kuka.com
Источник: kuka.com
Наклон и высоту стола можно регулировать, чтобы поддерживать гемодинамику пациента и обеспечить лечащему врачу или хирургу оптимальный доступ в операционную зону. Это является особым преимуществом при длительных вмешательствах, в процессе которых хирург должен носить тяжелый свинцовый фартук.
 Источник: kuka.com
Источник: kuka.com
“Если ты не видишь проблемы, то не можешь её вылечить. С новой роботизированной операционной мы можем вращать и двигать операционное поле во всех измерениях, чтобы быть полностью уверенными в точности своих действий”, — говорит доктор Даниэл Ким, сосудистый хирург.
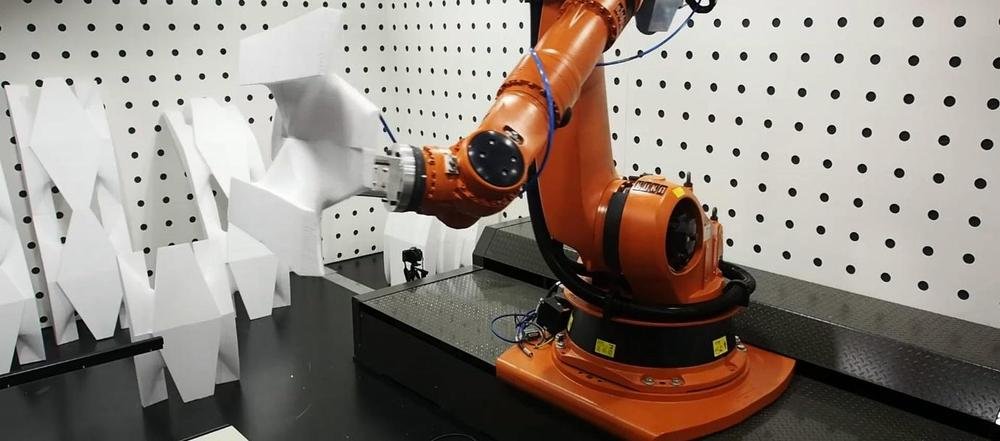
Студия Babelsberg, KUKA KR QUANTEC
 Источник: kuka.com
Источник: kuka.com
Фрезерный робот KUKA KR 210 R3100 QUANTEC вырезает скульптуры из твердой пены в Art Department Studio Babelsberg GmbH. Робот самостоятельно выполняет все необходимые действия. Это самый мощный и точный робот в серии KR QUANTEC. Помимо высокой точности, еще одним аргументом в пользу этой модели является дальность действия — более трех метров. Это необходимо, так как заготовки из твердого пенопласта имеет размеры три на три метра.
 Источник: kuka.com
Источник: kuka.com
“Благодаря высокой степени точности фрезерного робота KUKA, скульптура будет изготовлена в идеальном соответствии с цифровым чертежом”,
— говорит Себастьян Фойгт, руководитель 3D-лаборатории в художественном отделе Studio Babelsberg GmbH.
Рекомендуемое оборудование
Hanwha — коллаборативный робот
 Источник: hycobot.com
Источник: hycobot.com
Коллаборативный робот, которого, благодаря модульной конструкции, сможет собрать даже школьник. Работать с ним так же просто, как использовать смартфон. При желании, оператор может вручную переместить робота в нужное положение и позволить ему запомнить новое движение. Такая функция прямого обучения позволяет даже неопытным операторам заставить робота выполнять задание. Один блок управления может управлять двумя роботами одновременно, что снижает первоначальные затраты. Модуль ввода-вывода и гнездо EtherCAT, расположенные на корпусе робота, позволяют легко подключать различные периферийные устройства, такие как захват, оптический датчик и другие.
KUKA KR 10 R900 SIXX (KR AGILUS)
 Источник: youtu.be
Источник: youtu.be
Робот Kuka KR 10 R900 SIXX – многофункциональная модель, которая предназначена для измерения и тестирования, обработки поверхностей, сборки и скрепления, обслуживания других станков, а также для переноски различных предметов и паллетирования. Манипулятор оснащен системой распознавания нового поколения. Это компактный 6-ти осевой робот, который может быть закреплен практически на любой поверхности, в том числе на потолке или стене. Дальность действия робота — до 90 см (1101 мм для модели KUKA KR 10 R1100 FIVVE), а грузоподъемность до 10 кг, при собственном весе – 54 кг.
Особенности модели KR 10 R900 SIXX:
- компактные размеры, подходит для оснащения даже небольшого рабочего места;
- простота в установке и обслуживании;
- специализированное ПО, разработанное для этой серии манипуляторов — KR C4 compact;
- широкая область применения;
- простота в установке и обслуживании;
- специализированное ПО;
- высокая скорость работы;
- степень защиты IP 54.
KUKA KR 16-3s
 Источник: top3dshop.ru
Источник: top3dshop.ru
Робот Kuka KR 16-3 S – скоростная модель для измерения и тестирования, обработки поверхностей, сборки и скрепления, обслуживания других станков, а также для переноски различных предметов и паллетирования. Манипулятор оснащен системой распознавания нового поколения. Это 6-ти осевой робот, который может быть закреплен практически на любой поверхности, в том числе на потолке или полу. Дальность действия манипулятора – 1611 мм, грузоподъемность до 16 кг, при собственном весе 235 кг.
Особенности модели KR 16-3 S:
- большой радиус действия;
- широкая область применения;
- простота в установке и обслуживании;
- возможность интеграции в конвейерные ленты;
- специализированное ПО;
- высокая скорость работы.
KUKA KR 90 R3700 PRIME K (KR QUANTEC PRIME)
 Источник: prweb.com
Источник: prweb.com
Робот KUKA KR 90 R3700 PRIME K (KR QUANTEC PRIME) отличается не только изяществом и легкостью, но и сверхточной и жесткой конструкцией. Имеет высокую энергоэффективность и точность траекторий. Несмотря на небольшой вес, продуктивность машины невероятно высока при максимальной динамике. Грузоподъемность робота составляет 90 кг, радиус действия — 3,7 м.
При выполнении сложных операций с большими грузами роботы KUKA сверхвысокой грузоподъемности обеспечат вашему предприятию дополнительные производительные преимущества. Они с блеском справляются с такими задачами, как перемещение и обработка тяжелых и крупноразмерных деталей, обслуживание оборудования и палетирование.
Fanuc LR-mate 200ID/5L
 Источник: robots.com
Источник: robots.com
Fanuc lr mate 200id 5l — робот для производственных работ в различных промышленных сферах. Оснащенный подвижной рукой, этот агрегат способен выполнять большое количество операций с грузами небольшого веса и размера. Устройство Fanuc lr mate 200id 5l отличается большой скоростью совершения операций, а также максимальной точностью.
Применяется в условиях ограниченной площади: узкое основание и поворотный узел с широким радиусом работы дают возможность эксплуатировать устройство даже в самых неудобных положениях. Все модели оснащены системами датчиков и сенсоров.
Ознакомьтесь на сайте с большим ассортиментом роботов для любого производства.
Какие преимущества дает вам использование промышленных роботов
 Источник: youtube.com
Источник: youtube.com
Эффективность
Промышленные роботы способны выполнять определенные задачи быстрее, точнее и лучше людей. Автоматизация процессов, которые раньше занимали значительно больше времени и ресурсов, приведет к большей эффективности производственной линии.
Пример: китайская компания Precision Technology Company заменила роботами более 90% сотрудников завода — там, где 650 человек собирали телефоны вручную, сейчас работает 60 роботов и 60 операторов, что увеличило производительность на 250% и уменьшило выход брака на 80%.
Качество
Благодаря высокому уровню точности и повторяемости, исправные роботы всегда будут производить только качественный продукт, соответствующий заданной программе, а также сократят необходимое для контроля качества время.
Безопасность
Промышленные роботы часто используются для выполнения задач, которые считаются опасными и/или вредными для человека, а также для выполнения трудоемких и повторяющихся задач. Используя промышленных роботов, вы улучшите условия труда и безопасность на своем предприятии. Роботы не устают и не совершают опасных ошибок, а также не страдают от болезней и травм.
 Источник: pixmafia.com
Источник: pixmafia.com
Рентабельность
Благодаря повышению производительности предприятия и качества продукции, а также сокращению ресурсозатрат, роботы позволяют увеличить рентабельность бизнеса.
Как оборудовать производство
Для оснащения предприятия робототехникой обращайтесь в Top 3D Shop — наши специалисты изучат ваши требования и задачи, условия размещения оборудования, учтут все тонкости и подготовят индивидуальный проект интеграции роботов, чтобы увеличить производительности и рентабельности предприятия.
Рекомендуемые товары




{kind=link}





Оставить комментарий