

3D-принтеры с разной кинематикой: сравнение, плюсы и минусы

Введение
Существует множество технологий печати для 3D-принтеров: цифровая светодиодная проекция (DLP), лазерная стереолитография (SLA), селективное лазерное спекание (SLS), тепловое спекание (SHS) и т.д. В этой статье мы рассказываем о самых популярных на данный момент 3D-принтерах FFF.
 Источник: http://www.thegolfclub.info
Источник: http://www.thegolfclub.info
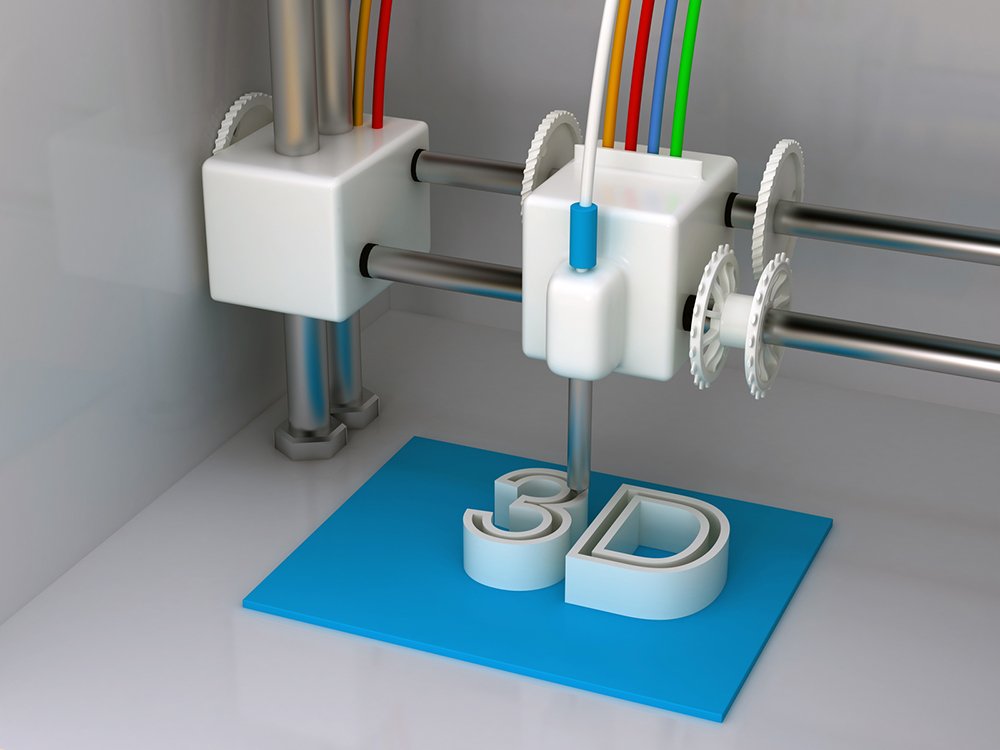
FFF-принтеры (Fused Filament Fabrication, «производство методом наплавления нитей»), также известны как принтеры FDM (от Fused Deposition Modelling, «моделирование методом наплавления»). Представляют собой устройства для создания трехмерных объектов, как понятно из названия, путем послойного нанесения на рабочую поверхность расплавленного термопластика. FFF-принтеры используются как для коммерческой, так и для домашней печати моделей.
Виды кинематики 3D-принтеров
Каждый 3D-принтер имеет собственную кинематическую схему, согласно которой приводятся в движение механические части устройства: платформы и экструдеры. Ниже мы рассмотрим четыре типа FDM 3D-принтера: картезианский, дельта, полярный и роботизированный манипулятор.
 Источник: https://www.aldi.co.uk
Источник: https://www.aldi.co.uk
Картезианские 3D-принтеры
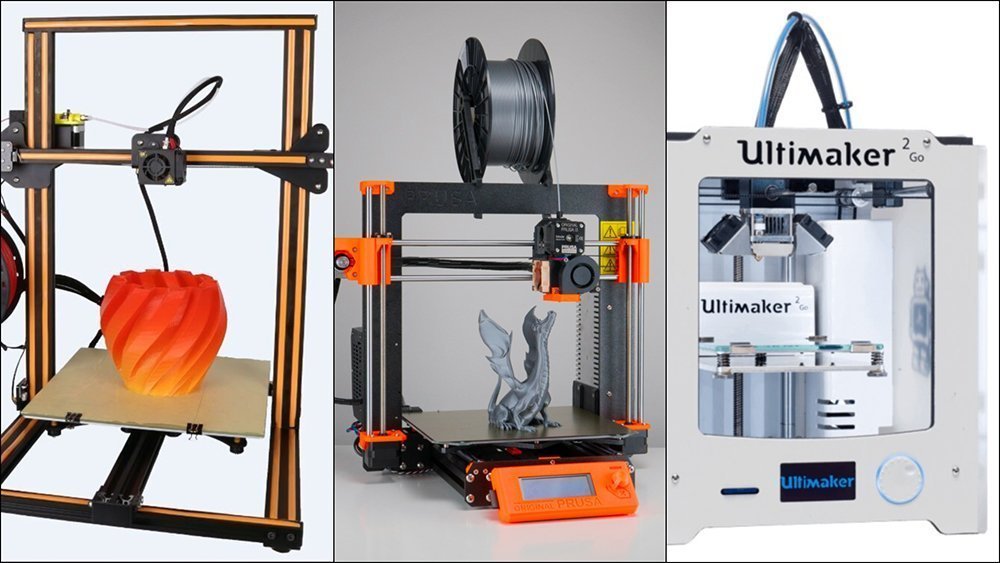
На рынке 3D-принтеров FFF / FDM самыми распространенными являются приборы с картезианской кинематикой. Основанная на декартовой системе координат, эта технология работает на основе трех осей – X, Y, Z. По одной или нескольким из них осуществляется движение механических частей прибора, т.е., заданные по осям координаты реализуют схему перемещения и положения печатающей головки относительно платформы.
 Источник: https://www.ebay.com
Источник: https://www.ebay.com
Количество вариантов перемещения печатной головы и платформы ограничено:
- Платформа передвигается по одной из горизонтальных осей — X или Y, экструдер движется по другой и в высоту.
- Платформа перемещается по высоте, по оси Z, а экструдер передвигается по двум плоскостям, вперед-назад и влево-вправо.
- Платформа движется по одной из осей и в высоту, экструдер - по другой оси.
- Платформа неподвижна, экструдер передвигается по всем трем осям.
- Платформа движется по осям XY, экструдер перемещается по высоте.
 Источник: https://ting.com/
Источник: https://ting.com/
Вторая схема является самой распространенной — когда платформа для печати перемещается по оси Z (вверх и вниз), а экструдер работает в двух измерениях, по плоскостям XY.
Преимущества картезианской схемы
Из всех видов кинематических схем FDM 3D-принтеров, картезианские показывают практически идеальную стабильность результатов. Расходные материалы для FDM имеют низкую стоимость и поставляются в широчайшем ассортименте цветов и материалов. Часто картезианские 3D-принтеры применяются в коммерческих целях – для печати на заказ и на продажу бытовых объектов, сувенирной продукции и украшений.
 Источник: http://realseolinks.com/
Источник: http://realseolinks.com/
Картезианские 3D-принтеры уже давно и прочно обосновались в жизни любителей и профессионалов 3D-печати. Поэтому в сети множество тематических сообществ с исчерпывающей информацией об устройстве принтеров, работе с ними и создании моделей, от простых до сложных.
 Источник: https://store.hp.com/
Источник: https://store.hp.com/
Модели, построенные на декартовой системе координат, можно разделять на составные части для печати, что позволяет создавать 3D-печатные объекты любого размера, не ограниченные объемом принтера. Многие 3D-принтеры поставляются в виде набора для сборки. Для новичков и тех, кто не хочет разбираться в устройстве принтера, производители поставляют готовые устройства. С ними печатать модели можно практически после распаковки.
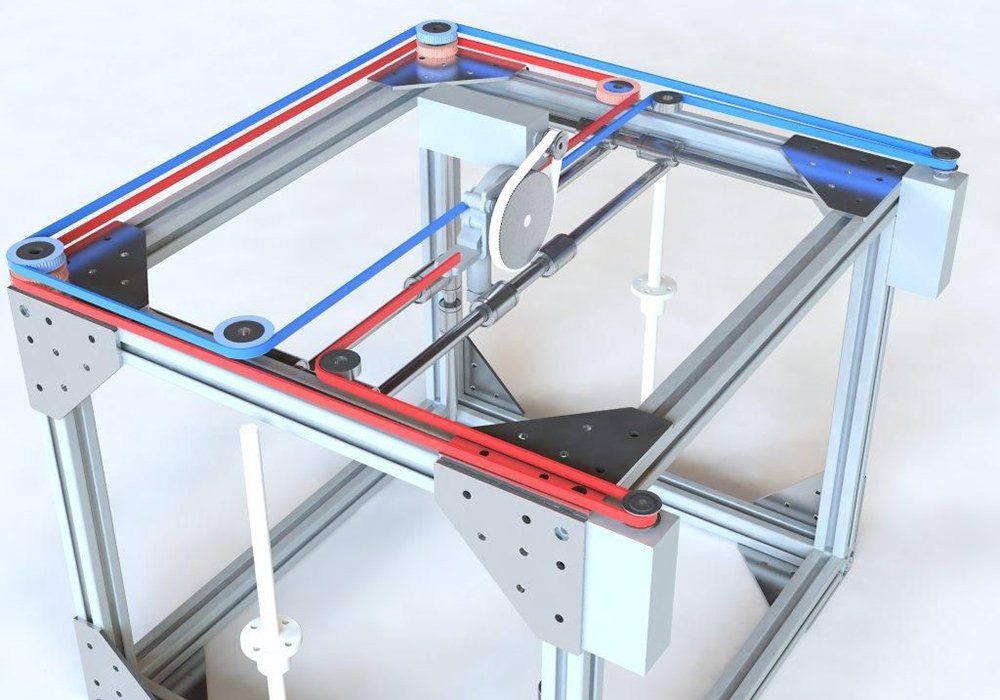
Разновидности картезианской кинематики CoreXY и H-Bot
Данные кинематические схемы часто встречаются в коммерческих сферах. Отличаются оригинальными методами позиционирования экструдера. В обоих кинематиках платформа передвигается вверх-вниз.
 Источник: https://www.pinterest.ru/
Источник: https://www.pinterest.ru/
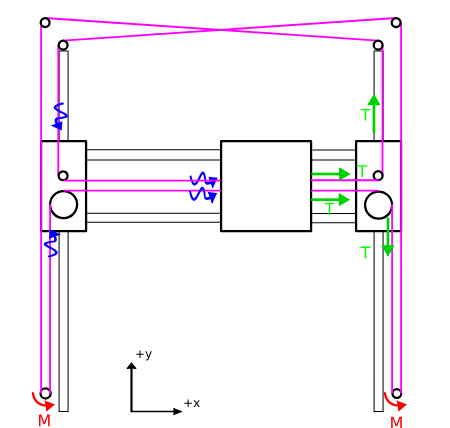
CoreXY имеет два закрепленных на раме двигателя, которые приводят в движение два ремня для перемещения каретки экструдера по осям XY.
 Источник: smoothieware.org
Источник: smoothieware.org
 Источник: https://www.youtube.com/
Источник: https://www.youtube.com/
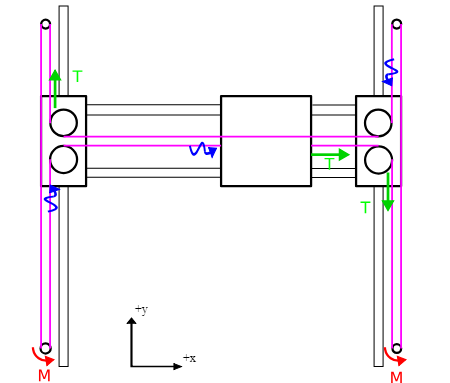
Кинематика H-Bot для 3D-принтера основана на похожей механике, но с другим ременным приводом. В данном случае ремень один и натянут по форме, напоминающей обведенную по контуру букву H (аш), за что схема и получила название аш-бот.
 Источник: smoothieware.org
Источник: smoothieware.org
При работе обоих двигателей в одну сторону, каретка движется по оси X, в разные стороны — по оси Y. Когда один из двигателей остается неподвижным, каретка перемещается по диагонали.
Designer X PRO

Характеристики:
- Материал для 3D печати: PLA, ABS, PLA Flexible, PVA, PC, Hips, Nylon, Laywood, FilaFlex, Filamentarno (диаметр нити 1.75мм);
- Область печати: 200 х 200 х 210 мм;
- Материал корпуса: Алюминий (композит);
- Направляющие: XY: рельсовые (сталь), Z: цилиндрические (сталь)
- Толщина слоя: от 0,05 до 0,25 мм (регулируется настройками ПО принтера);
- Точность позиционирования: XY: 11 микрон; Z: 1.25 микрон;
- Наличие подогреваемой платформы: Да;
- Платформа печати: Алюминий - стекло;
- Количество печатающих головок: 2;
- Автоматическая калибровка стола: Да;
- Плата управления: на базе ядра ARM CORTEX M4 32-битного процессора STM;
- Интерфейсы: USB, Ethernet, USB Flash (в комплекте);
- Совместимость с программным обеспечением: Windows XP, Windows 7, Windows 8;
- Скорость печати: до 30 см3/час;
Устройство для печати моделей высокого качества, сравнимых с промышленными изделиями. Обладает функцией двухматериальной печати. ПО полностью контролирует процесс, что минимизирует ошибки и увеличивает производительность 3D-принтера.
Примеры печати:
 Источник: https://msk.3dprint54.ru
Источник: https://msk.3dprint54.ru

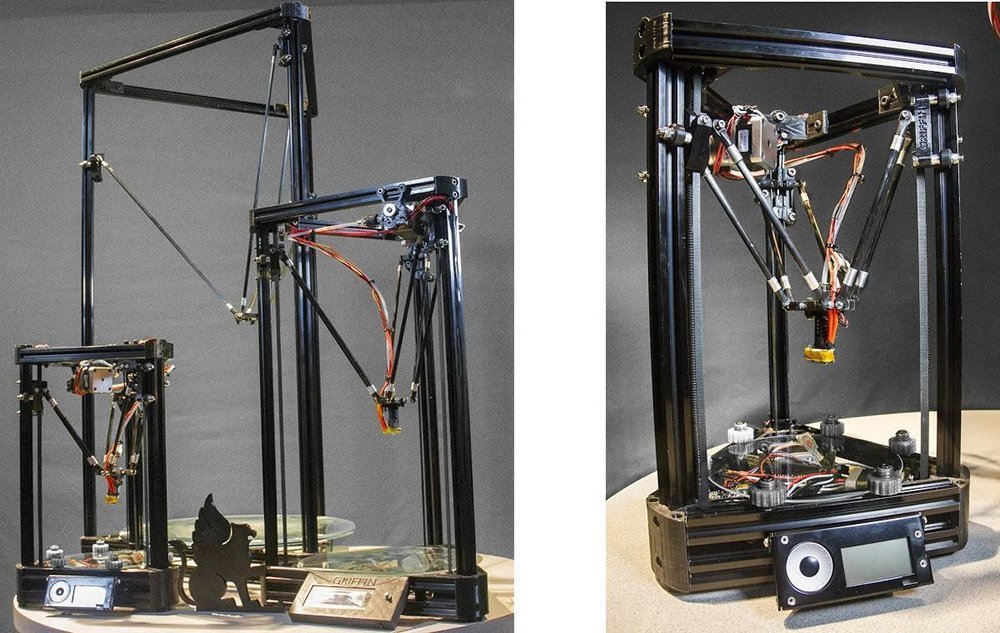
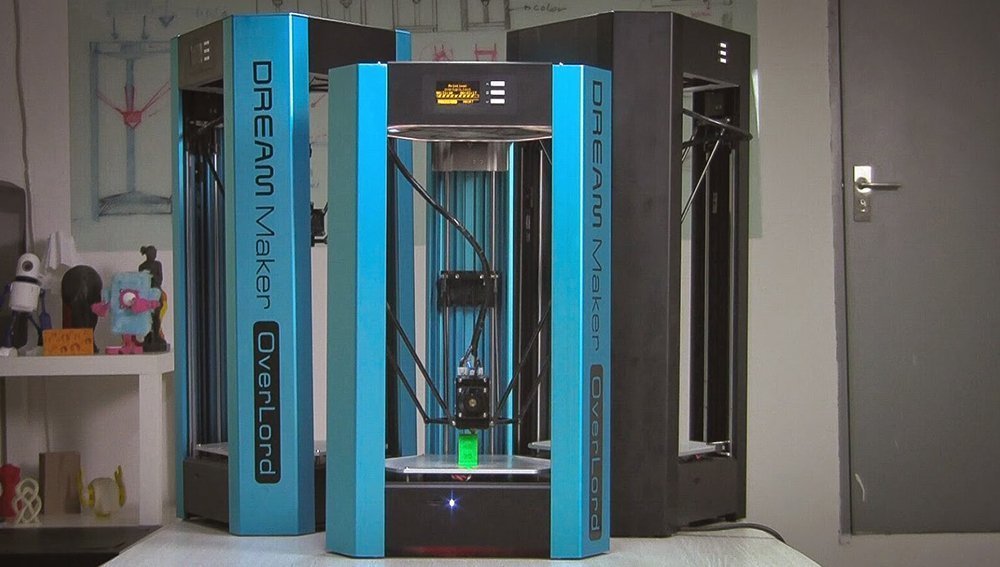
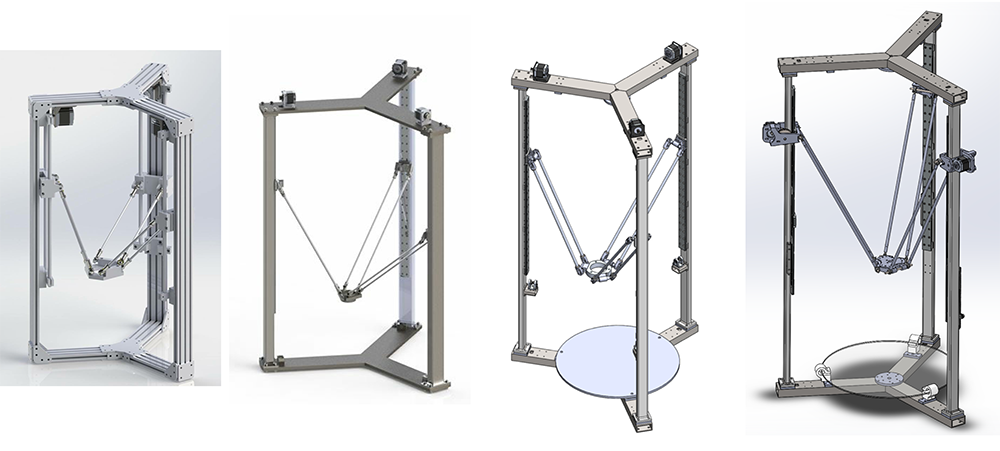
Дельта-принтеры
Дельта-принтеры и внешне, и по способу реализации механики отличаются от картезианских. Главное отличие заключается в способе передвижения экструдера относительно рабочего стола.
 Источник: https://3dprint.com
Источник: https://3dprint.com
 Источник: https://3dprint.com/
Источник: https://3dprint.com/
 Источник: https://www.3dprintpulse.com/
Источник: https://www.3dprintpulse.com/
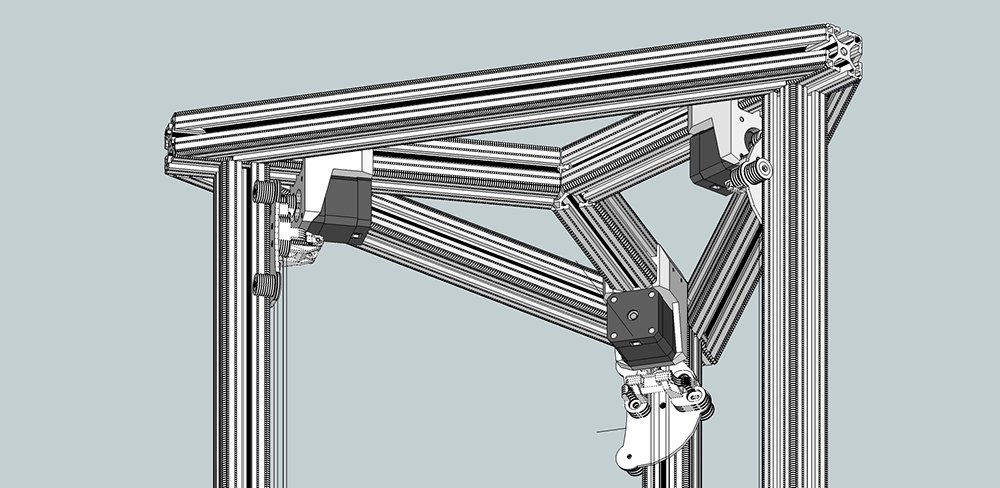
DELTA механика для 3Д-принтера визуально представляет собой закрепленный на трех точках экструдер, соединенный в единую конструкцию с неподвижной платформой для печати.
Достоинства и недостатки дельта-ботов
Кинематика Delta, по сравнению с картезианскими моделями, имеет более высокую скорость печати, но меньшую точность на краях модели. Причина в том, что для движения экструдера задействованы все три точки крепления, их двигатели работают одновременно, что приводит к накоплению ошибок в позиционировании координат.
 Источник: http://www.tawan.co/
Источник: http://www.tawan.co/
Другие преимущества:
- Малогабаритность. Конструкция высокая, но в длину и ширину не занимает много места.
- Отсутствие выступающих деталей. Можно самостоятельно увеличить жесткость рамы и закрыть корпус.
- Возможность построить высокие вертикальные модели.
 Источник: http://rwgresearch.com/
Источник: http://rwgresearch.com/
Недостатки:
- Высокая ценовая категория.
- Сложны для самостоятельной сборки. Новичкам будет сложно собрать конструкцию достаточно точно, поэтому рекомендуется использовать готовые решения, поставляемые в собранном виде.
- Специфика работы с полярными координатами: менее распространенное ПО и более дорогая электроника, т.к. выше требования к вычислительной мощности начинки.
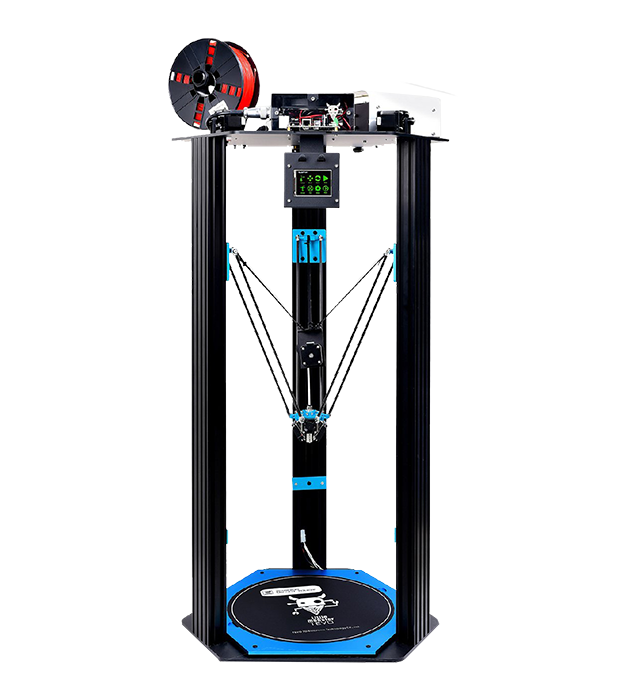
3D принтер Tevo Little monster
Характеристики:
- Совместимость с операционными системами: Windows, Linux, Mac;
- Электропитание: 220 В;
- Размеры, мм: 600x600x1200;
- Вес, кг: 28;
- Количество экструдеров: 1;
- Рабочая камера, мм: 340x340x500;
- Температура экструдера: 200°C;
- Толщина слоя: от 50 мкм;
- Интерфейсы: SD, USB;
- Скорость печати: 300 мм/с;
Используется для коммерческой деятельности, в дизайне, рекламе и образовательных целях, а также применяется в качестве домашнего 3D-принтера. Отличается высокой скоростью печати и малыми габаритами. Работает со множеством материалов: PLA, ABS, Flexible PLA, HIPS, WOOD, PVA, Nylon.
Примеры печати:
 Источник: https://twitter.com/
Источник: https://twitter.com/
 Источник: http://3dcreateandprint.com
Источник: http://3dcreateandprint.com
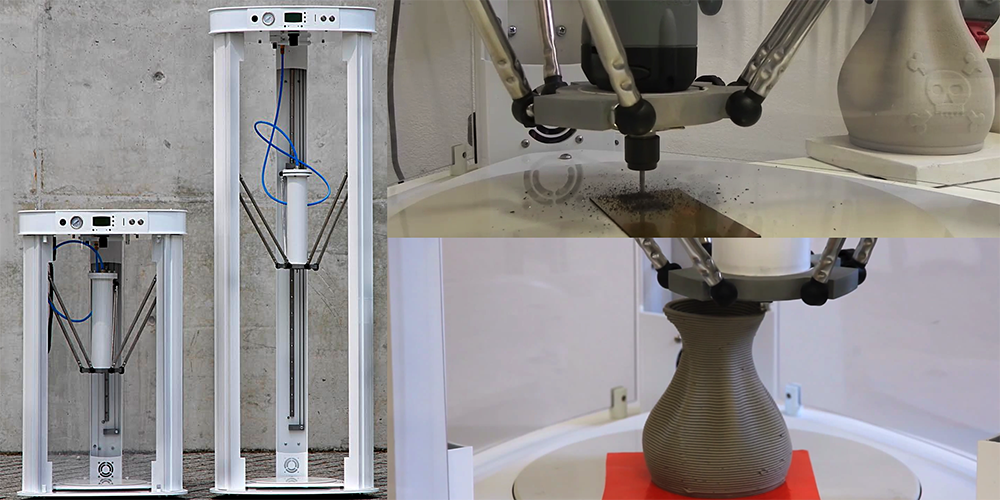
Полярные 3D-принтеры
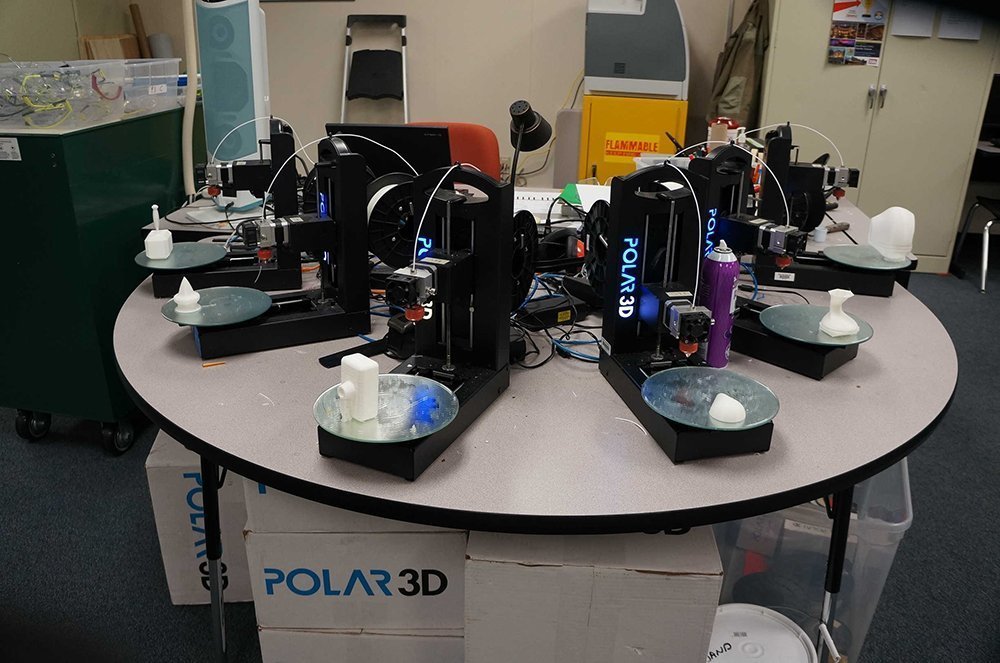
Достаточно новая, но интересная кинематическая полярная схема представлена на рынке одноименной компанией Polar. Как следует из названия, в печати используется полярная система координат — вместо привычных XYZ, позиционирование экструдера задается радиусом и углом.
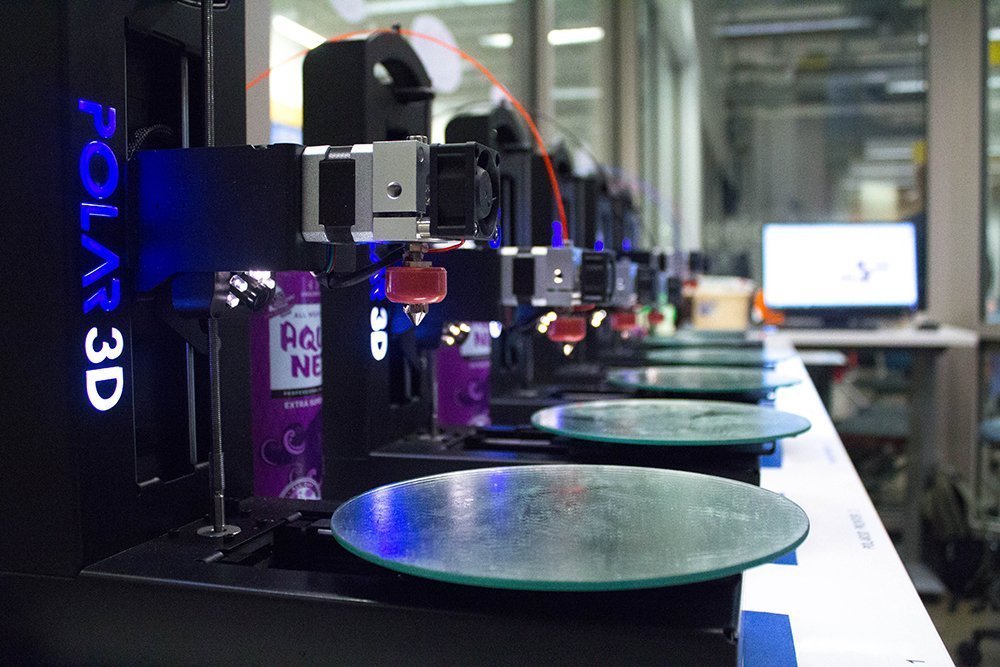
Источник: http://www.purdue3dpc.org
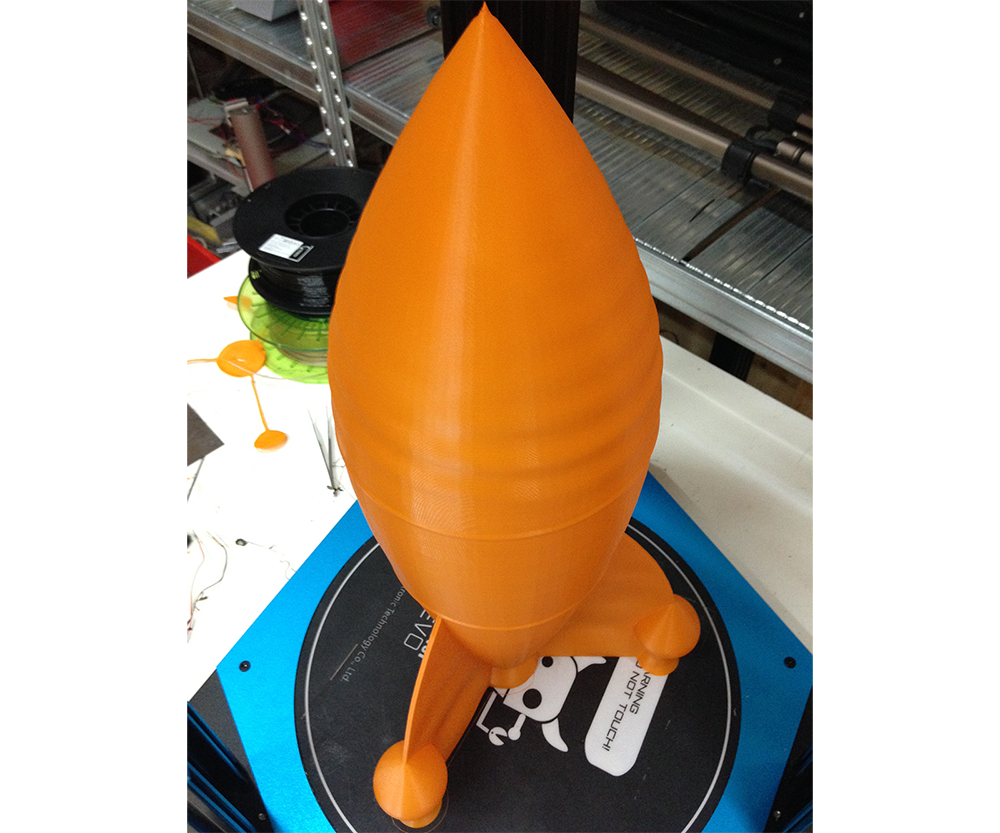
Платформа таких 3D-принтеров имеет круглую форму, вращается по кругу и двигается целиком по одной горизонтальной оси, при этом экструдер движется только вверх и вниз. Представьте себе виниловый проигрыватель – печатающая головка принтера работает по принципу иглы звукоснимателя, движущейся по пластинке. С той лишь разницей, что тут “пластинка” не только вращается, а “игла” наоборот ограничена в перемещениях.
Плюсы и минусы полярной механики
Полярные 3D-принтеры позволяют создавать крупные объекты, при этом экономя средства за счет высокой энергоэффективности. Они пока имеют низкую точность, но в долгосрочной перспективе, возможно, производитель сможет решить эту проблему.
 Источник: https://about.polar3d.com/
Источник: https://about.polar3d.com/
Polar 3D
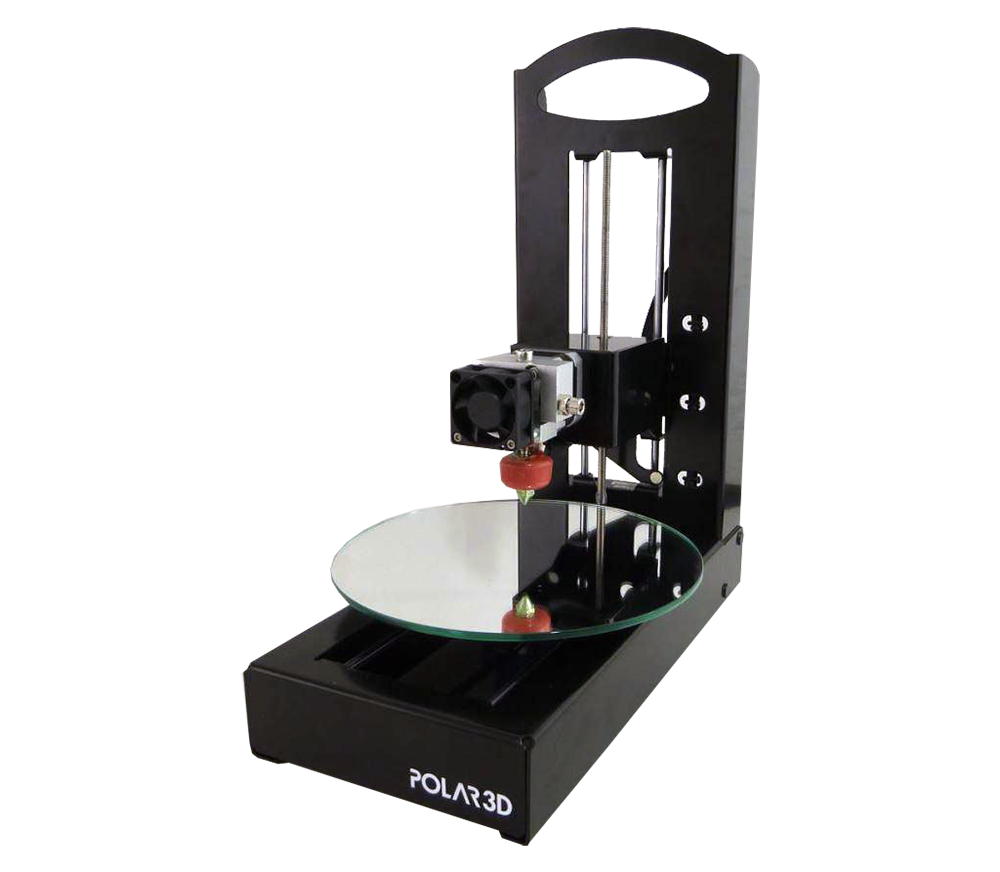
Характеристики:
- Габаритные размеры, мм: 200х310х350;
- Вес, кг: 4,6;
- Толщина слоя: от 50 мкм;
- Толщина нити: 1,75 мм;
- Используемый материал: PLA;
- Интерфейсы: порт Ethernet и два порта USB;
Подогрев печатной платформы отсутствует, что затрудняет использование ABS. Имеет скромные габариты, хорошую производительность, но низкую точность, по сравнению с дельта-принтерами и моделями с декартовой системой координат. Производитель рекомендует приобретать модель для образовательных целей.
Примеры печати:

 Источник: https://www.tomsguide.com/
Источник: https://www.tomsguide.com/
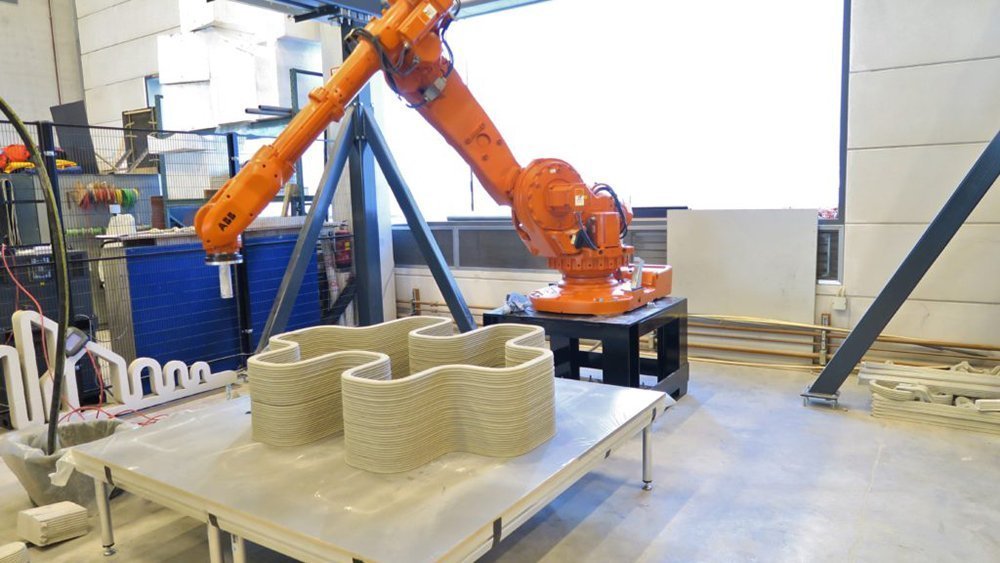
3D-принтеры с роботизированными манипуляторами
Представляют собой конструкцию с механическим программируемым манипулятором-захватом заменяемым экструдером. Если речь о крупных промышленных экземплярах (а бывают и более компактные), то, помимо функций манипулятора и 3D-принтера, такой робот может производить сварочные работы, фрезерование, покраску и другие операции.
 Источник: http://www.dubox.me/
Источник: http://www.dubox.me/
Хотя механика 3Д-печати с робо-рукой в основном применяется в промышленности, существуют модели для индивидуального использования, с широким набором функций.
Роборука Dobot Magician Educational
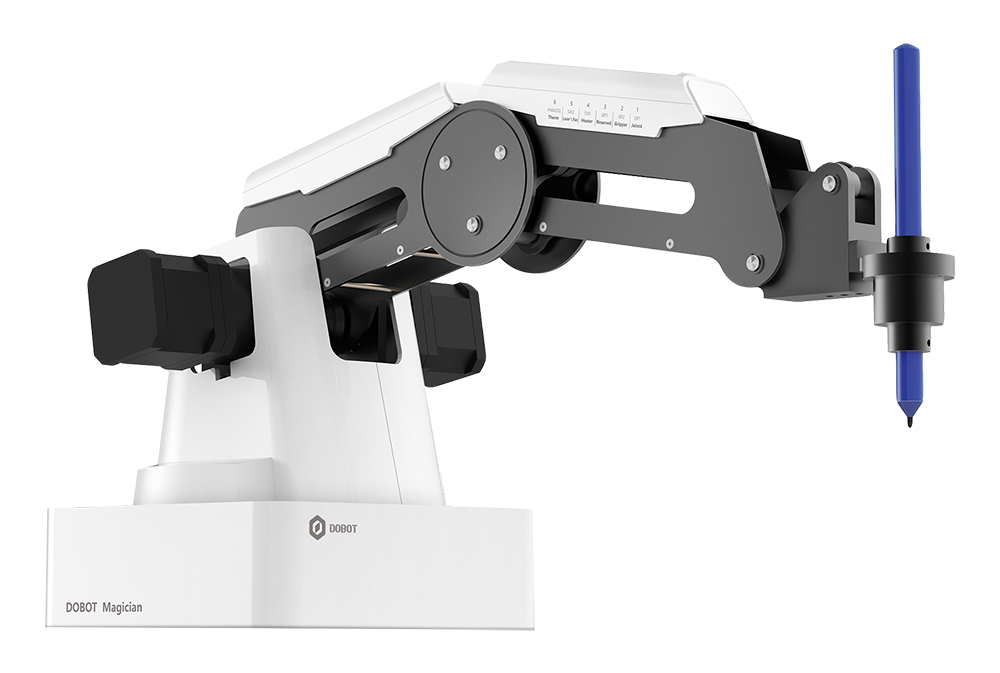
Характеристики:
- Электропитание: 12 В, 60 Вт;
- Размеры, мм: 340х300х400;
- Вес, кг: 3,4;
- Погрешность: до 0,2 мм;
- Программное обеспечение: Dobot Studio.
Обладает множеством функций: может рисовать, писать, захватывать и перемещать предметы, выполнять лазерную гравировку и т.д.
Примеры печати:
 Источник: https://www.amazon.com
Источник: https://www.amazon.com
 Источник: https://www.youtube.com/
Источник: https://www.youtube.com/
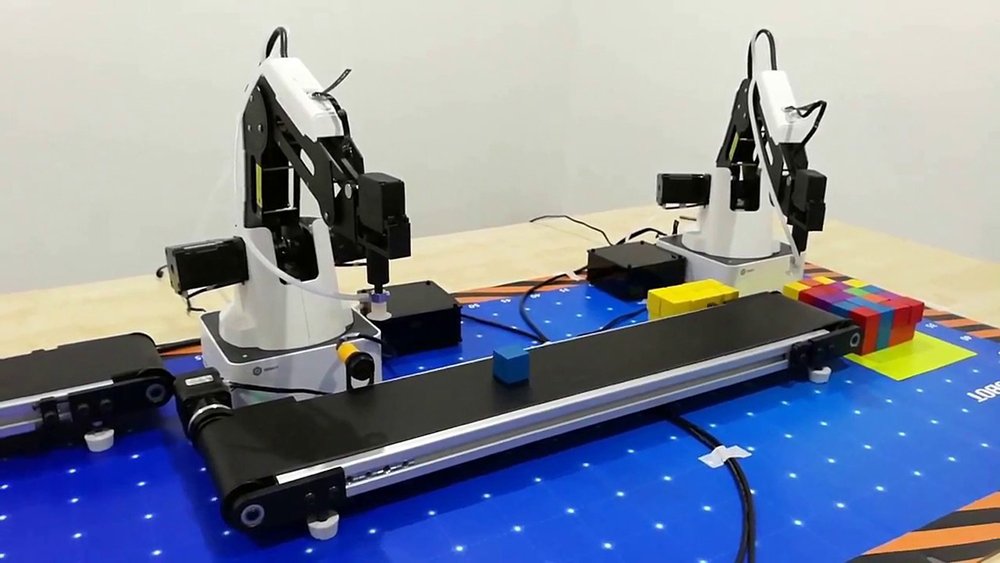
SCARA
SCARA (Selective Compliance Articulated Robot Arm) — кинематика основанная на перемещении рабочего блока в горизонтальной плоскости за счет вращения в сочленениях рычажного механизма.
Построенные на данной схеме устройства отличаются очень высокой точностью и повторяемостью, намного выше чем у традиционных роботов-манипуляторов, низким уровнем шума и вибрации, компактностью. Если говорить о картезианских и SCARA-роботах сравнимых размеров и массы, то скара как правило не только точнее, но и быстрее.
В то же время, такие устройства дороги, имеют ограничения жесткости по осям XY, меньшую область работы и свободу движений.
Dobot M1 роборука

Характеристики:
- Совместимость с операционными системами: Windows, Mac, Linux.
- Интерфейсы: USB, Bluetooth, Wi-Fi.
- Привод: пневматический.
- Количество осей: 4.
- Высота: 52,7 см.
- Вес: 3,4 кг.
- Длина руки-манипулятора: 40 см.
- Грузоподъемность: до 1,5 кг с точностью до 0,02 мм.
- Система управления: DOBOT BLOCKY.
Компактный настольный робот, совмещает в себе функции 3D-принтера и манипулятора. Действия программируются через установленное на компьютере ПО или мобильное приложение. Имеет сменные головки для печати, гравировки, пайки и сборки.
 Источник: https://www.thingiverse.com/
Источник: https://www.thingiverse.com/
 Источник: https://thegadgetflow.com/
Источник: https://thegadgetflow.com/
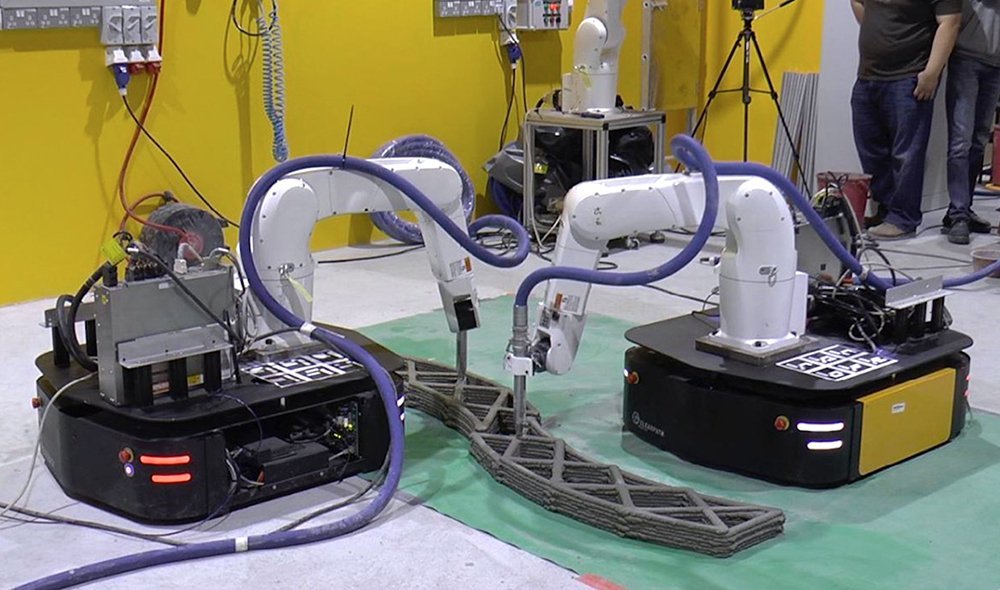
Анализ роботизированных кинематических схем
Преимущества 3D-принтеров с роботизированным манипулятором очевидны – такой принтер не ограничен объемом рабочей камеры, которой у него нет – при той же области печати, само устройство занимает намного меньше места.
 Источник: https://spectrum.ieee.org/
Источник: https://spectrum.ieee.org/
Экструдер может перемещаться не только послойно, как в настольных принтерах, но и по сложным траекториям в трех измерениях, и под разными углами, что облегчает процесс создания сложных конструкций. Несомненный плюс также то, что обычно это универсальные конструкции, при замене экструдера на другие блоки выполняющие множество задач.
По точности печати манипуляторы не составят конкуренции картезианским 3D-принтерам, но, благодаря своей универсальности и крупным размерам, промышленные роботы активно используются в 3D-печати в промышленных условиях, где почти незаменимы.
Миниатюрные настольные роботы хороши в первую очередь как наглядное пособие, а также объект хобби или инструмент для него.
Заключение
Выбирая устройство перед покупкой, прежде всего определитесь с целью — зачем вам нужен 3D-принтер? Коммерция, работа или развлечение? Универсальность FFF / FDM 3D-принтеров в том, что они подходят для разных применений.
 Источник: https://www.thermofisher.com/
Источник: https://www.thermofisher.com/
Не важно, хотите ли вы изучить 3D-печать и приобрести новое хобби, воплотить в жизнь творческие фантазии или открыть бизнес — для реализации каждой из этих целей найдется подходящий аппарат, надо лишь выбрать.
Рекомендуемые товары








Оставить комментарий